
The laboratory was already set up in 2002 to qualify students for the then already predicted growth market of autonomous mobile systems. It is used 80% for teaching and 20% for applied research. In teaching, selected concepts for the programming of autonomous mobile robots are implemented and evaluated within the framework of laboratory practicals. The practical tasks come from the fields of driver assistance systems, service robotics and production automation.
Goals and idea
In the field of driver assistance systems, students learn how to detect the environment of the automobile across vehicles and actively relieve the driver. In service robotics, tasks such as area-wide processing or the handing out of objects are dealt with. In production automation, concepts from the Industry 4.0 research area are practiced. These include freely navigating driverless transport systems as well as the autonomous picking of components.



Laboratory equipment and activities
Equipment and function
For programming, students use a teaching version of the commercial robot control software iRobCon. In the distributed architecture of iRobCon, students can implement and integrate task-related selected modules of the control program in Java. A simulator is available for testing the program parts. The control programs run distributed on the on-board computers of the mobile robots and the stationary development computers. The LINUX operating system runs on the mobile robots. On the development computers Windows is used.
Mobile Robots
- 6x Pioneer 3-DX for monitoring and manipulation with Canon VC-C4 PTZ colour camera, ultrasonic sensors, SICK-LMS200 laser sensor, tactile sensors (bumper arrays), 2DOF gripper, onboard embedded mamba computer, gyroscope for position control, wheel encoder, 2-wheel differential drive with differential gear
- 3x Pioneer 3-DX for manipulation with ultrasonic sensors, tactile sensors (bumper arrays), onboard embedded mamba computer, gyroscope for position control, wheel encoder, 2-wheel differential drive with differential wheel, 7DOF arm (Cyton Gamma 1500)
- 5x Pioneer 3-AT for localisation and mapping with Canon VC-C4 PTZ colour camera, ultrasonic sensors, SICK-LMS200 laser sensor, tactile sensors (bumper arrays), 2DOF gripper, onboard embedded mamba computer, gyroscope for position control, wheel encoder, 4-wheel differential drive, DGPS for outdoor navigation
- 2x PowerBot for manipulation and heavy payloads with PTZ colour camera Canon VC-C4, ultrasonic sensors, laser sensor SICK-LMS200, tactile sensors (bumper arrays), onboard embedded 965 ATX computer, gyroscope for position control, wheel encoder, 2-wheel differential drive with 2 differential wheels, 6DOF robot arm Powercube, fire-wire camera, stair sensor
- 1x KUKA Youbot for manipulation with omnidirectional drive, 2x 6DOF robot arm, Hokuyo URG-04LX laser scanner
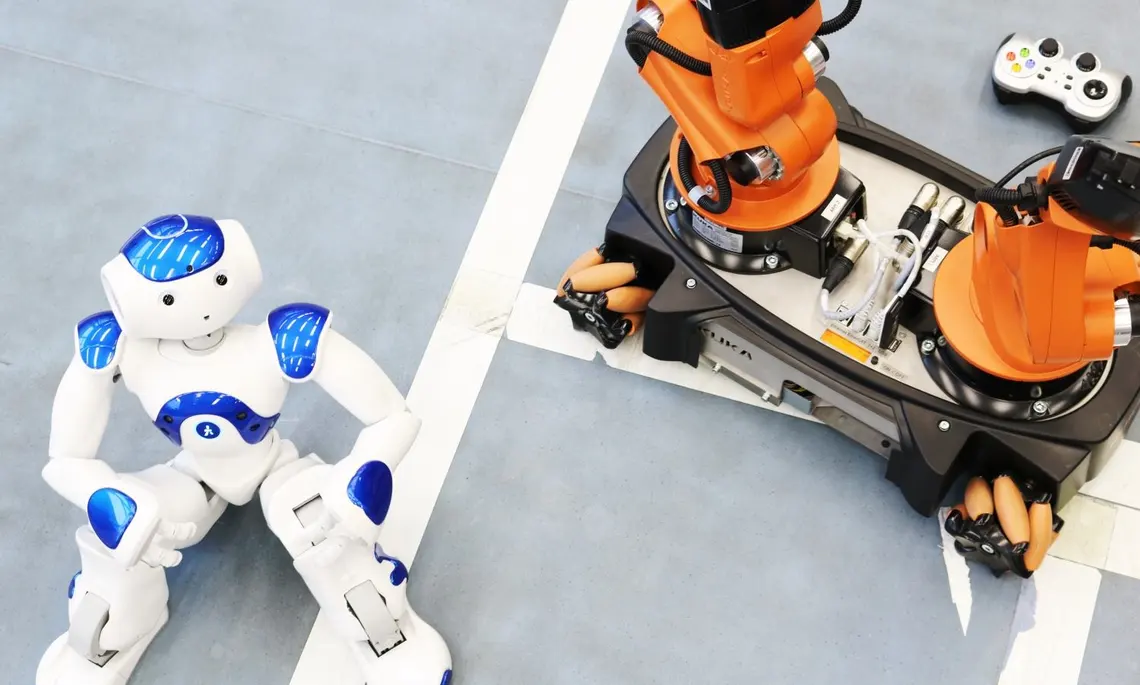
- Humanoid robot Nao as two-legged walking machine with gyrometer and acceleration sensor, loudspeakers, microphones, 2 colour cameras, sonar sensors, tactile sensors
Model factory
- On loan from Audi AG as an internship experiment for students Cell control by RFID technology (Baumer Ident)
- Control of the conveyor system by Siemens S7 PLC laser scanner SICK WL24 to protect the working area
Further camera systems
- Stereo camera Bumblebee2 from Point Grey for distance measurement
- Kinect sensor as stereo camera and structured light sensor for people tracking
- AXIS231D+Time-of-Flight Network Dome Camera MESA SWISSRANGER4000 for precise distance measurement
- Point Grey Ladybug2 omni-directional camera for image acquisition in an angular range of 360° Network camera Edimax IC-7110W for surveillance tasksIDS-uEye Gigabit Ethernet camera for HD recording
Software
- Image processing systems ACTS and MVTec Halcon
- Modelling and simulation with MATLAB (Fuzzy Toolbox, Robotics Toolbox)
- PLC programming with SIEMENS SIMATIC STEP7
Courses
- Internship in automation engineering in the bachelor's degree program in mechatronics, focus on production engineering
- Exercise for the lecture Intelligent Systems and X-by-Wire Systems in the two master courses Electrical Engineering of Mobile Systems and Applied Research
- Interdisciplinary student projects on mobile robotics in all study programs of the Faculty of Computer Science
- Exercise for the lecture "Informationstechnische Fahrzeugsteuerung" in the advanced training course electric mobility
Research
In applied research, the laboratory is used for preliminary investigations. Students from the Applied Research course in particular use the laboratory to evaluate initial programming concepts for the control of autonomous mobile robots. A main focus is the cooperation with mobile robots among themselves and the interaction of mobile robots with humans. The resulting feasibility studies are used as a basis for applications for international research projects. The actual research projects usually take place in the laboratories of the industrial partners.


![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)