
Since 15 years, the German Road Safety Council (Deutscher Verkehrssicherheitsrat e. V.), together with 25 other European countries, has been pursuing an ambitious project in European road traffic: Vision Zero. The goal is to reduce the number of fatalities and serious injuries in road traffic to zero by 2050. There is great potential in the automation of driving, as emergency braking assistants have already demonstrated. A large number of traffic accidents have already been prevented in this way. Nevertheless, accidents cannot be avoided despite increasing levels of automation, for example in the case of hidden objects or disturbed environmental sensors. In order to ensure the best possible protection for all road users in such situations, pre-crash systems will be used in the future. These systems activate protective systems, such as airbags to protect vehicle occupants, milliseconds before the accident occurs. It is important to avoid false activation at all costs. Incorrectly triggered airbags could injure the occupants and also cause the driver to lose control of the vehicle, turning what should be a harmless situation into a life-threatening one. Trajectory and crash severity estimation, based on the environment awareness of predictive sensor technology, can be used to predict if and when an accident will occur and how severe it will be. This allows the consequences of accidents to be mitigated by activating protective systems at an early stage. To this end, the C-ISAFE institute's staff are researching methods that can be used to approximate the accident constellation, including the severity of the accident on the occupants. Using both physical and AI-based methods, the researchers predict accident-relevant parameters such as collision speed and derive the loads on the head or upper body of the people involved in the accident. The methods developed in this way are then verified with real crash tests in C-ISAFE's own test hall.
Prediction of the crash constellation
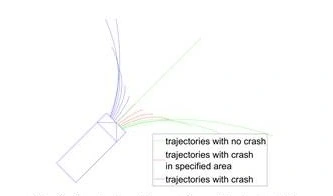
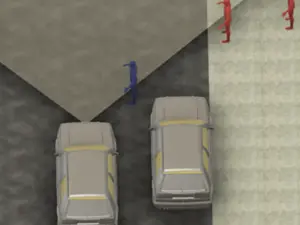
The detection of the inevitability of accidents in critical traffic situations is a key element for integral vehicle safety and pre-crash systems. For vehicles and objects with which a collision may occur, motion hypotheses are established that are based on physical motion models and parameterized with the object information, e.g. position and speed, from the sensors' environment model. All combinations of the physically possible motion trajectories calculated in this way for possible collision objects and the first-person vehicle are analyzed for collision events. In this way, accidents can be detected as unavoidable a few tenths of a second before the actual collision.
The C-ISAFE institute is specifically concerned with the question of how the inevitability of a collision can be reliably detected as early as possible and what factors influence the prediction accuracy. For this purpose, possible motion trajectories are modeled for all objects so that the actual motion as well as possible accident-avoiding evasive maneuvers are predicted in the best possible way. Since false triggering of irreversible elements of passive safety must be avoided at all costs, there are strong requirements for valid and robust detection of the inevitability and prediction of the accident constellation. In this context, the available information from the sensor system presents additional challenges due to measurement inaccuracies, limited sampling rates and the short time available before the collision.
Crash severity estimation

To take safety in autonomous driving to the next level, it is essential to activate irreversible safety systems a few milliseconds before the accident. The key factor here is the expected severity of the accident. It can be based either on the load on the human body or on kinematic parameters such as the average acceleration during the accident. Here, the predictive estimation of crash severity fulfills two fundamental functions.
On the one hand, it decides whether airbags are needed in the upcoming crash event. The deployment of irreversible restraints in the pre-crash phase is associated with a high risk, as the vehicle may become uncontrollable. As a result, false deployment can lead to serious injuries to the passengers and must therefore be avoided as far as possible. This is only possible with a prior assessment of the crash severity.
On the other hand, when an airbag is triggered, the exact timing of its deployment must also be determined in order to ensure the highest level of protection for the passenger. For this reason, both conventional and future airbag systems require methods with which the deployment timing can be adapted in advance to the detected crash scenario. Since the timing depends not only on the scenario but also significantly on the severity, estimation is essential here as well.
Therefore, C-ISAFE is researching on physical and AI-based methods that enable a reliable and robust crash severity estimation based on the environment sensor data while meeting the conditions for pre-crash applications. These algorithms are validated using real crash test data.
Contact-based validation sensor

One of the most important steps to activate any actuator for vehicle safety systems based on predictive sensor technology is robust validation. A medium-term goal is contact-based validation at contact time t0. This intermediate step also ensures a smooth transition to activation of safety actuators before t0.
Contact-based validation gives the system stability against disturbances caused by weather, for example. In addition, false triggering due to other sensor issues can be avoided. Light and soft objects with a large radar cross-section, for example, can fool a purely radar-based system, but false triggering is intercepted by subsequent validation. Thus, damage to passengers and other road users due to false triggering of passive restraints can be avoided. In addition, information can be extracted from the validation sensor to further increase the safety level. Shortly after t0, the validation sensor measures the position and overlap of the impact. These values are then compared with the predictions from the predictive sensor systems and in this way validate the environment sensors.


Publications
- A.-L. Schlamp, K. Schneider, R. Lugner, G. J. Sequeira, and T. Brandmeier, “Approximation of the overlap for integral safety systems,” in Fahrzeugsicherheit: Auf dem Weg zur Fahrzeugsicherheit 2030, 2022, pp. 407-418, doi: 10.51202/9783181023877-407.
- R. Krause, R. Lugner, M. Inderst, K. Schneider, G. J. Sequeira, and T. Brandmeier, "Interface and Optimizations for Crash Severity Estimation and Inevitability Modelling in Pre-Crash Safety Systems," in Proceedings of the FISITA 2021 World Congress, 2021.
- G. J. Sequeira, R. Lugner, T. Brandmeier, E. Elnagdy, G. Danapal, and U. Jumar, “Investigation of Different Classification Algorithms for Predicting Occupant Injury Criterion to Decide the Required Restraint Strategy,” in 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), 2021 Indianapolis, IN, USA, pp. 204-210, doi: 10.1109/ITSC48978.2021.9564868.
- K. Schneider, R. Lugner, M. Inderst, T. Weigl, and T. Brandmeier, “Verification of Crash Severity Estimation Algorithm for Autonomous Driving Using Real Crash Data,” in Proceedings of the 2020 4th International Conference on Vision, Image and Signal Processing (ICVISP 2020), Bangkok, Thailand, 2021, pp. 1-6, doi: 10.1145/3448823.3448850.
- G. J. Sequeira, A. Patel, S. Afraj, R. Lugner, and T. Brandmeier, “FEM-based Methodology for Crash Severity Estimation in Frontal Crash Scenarios,” IOP Conference Series: Materials Science and Engineering, vol. 2020, no. 831, 2020, The 7th International Conference on Mechanical, Automotive and Materials Engineering 8-10 December, Melbourne, Australia, doi: 10.1088/1757-899X/831/1/012019.
- K. Schneider, M. Inderst, and T. Brandmeier, “Hybrid Model Based Pre-Crash Severity Estimation for Automated Driving,” in 2020 IEEE 3rd Connected and Automated Vehicles Symposium (CAVS), Victoria, BC, Canada, 2020, pp. 1-6, doi: 10.1109/CAVS51000.2020.9334670.
- R. Lugner, D. Vriesman, M. Inderst, G. J. Sequeira, N. Pasupuleti, A. Zimmer, and T. Brandmeier, “Evaluation of Sensor Tolerances and Inevitability for Pre-Crash Safety Systems in Real Case Scenarios,” in 2020 IEEE 3rd Connected and Automated Vehicles Symposium (CAVS), Victoria, BC, Canada, 2020, pp. 1-6, doi: 10.1109/CAVS51000.2020.9334578.
- R. Lugner, M. Inderst, G. J. Sequeira, K. Schneider, and T. Brandmeier, “Collision Prediction for Irreversible Pre-Crash Safety Measures,” in FISITA Web Congress 2020.
- D. Steinhauser, P. HeId, A. Kamann, A. Koch, and T. Brandmeier, "Micro-Doppler Extraction of Pedestrian Limbs for High Resolution Automotive Radar," in 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019, pp. 764-769, doi: 10.1109/IVS.2019.8813850.
- K. Schneider, et. al., “Crash severity estimation in oblique crashes for integrated safety systems,” in Proceedings of the 5th International Symposium on Future Active Safety Technology toward Zero Accidents (FAST-zero’19), Blacksburg, Virgina, USA, doi: 10.1243/09544070D14904.
- G. J. Sequeira, R. Lugner, U. Jumar, and T. Brandmeier, “A validation sensor based on carbon-fiber-reinforced plastic for early activation of automotive occupant restraint systems,” Journal of Sensors and Sensor Systems, vol. 8, pp. 19-35, doi: 10.5194/jsss-8-19-2019.
- P. Held, D. Steinhauser, A. Kamann, T. Holdgrün, I. Doric, A. Koch, and T. Brandmeier, “Radar-Based Analysis of Pedestrian Micro-Doppler Signatures Using Motion Capture Sensors,” in 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 2018, pp. 787-793, doi: 10.1109/IVS.2018.8500656.
Contact

Prof. Dr.-Ing. Thomas Brandmeier
Phone: +49 841 9348-3840
Room: H023
E-Mail: Thomas.Brandmeier@thi.de

Robert Lugner, M.Sc.
Phone: +49 841 9348-3340
Room: H024
Fax: +49 841 9348-993340
E-Mail: Robert.Lugner@carissma.eu
![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)