
The functionality of future driver assistance, automation and safety functions must be permanently in place to ensure support for the driver and protection for passengers and other road users. The predictive vehicle sensor technology must therefore reliably and robustly detect its environment under all environmental conditions.
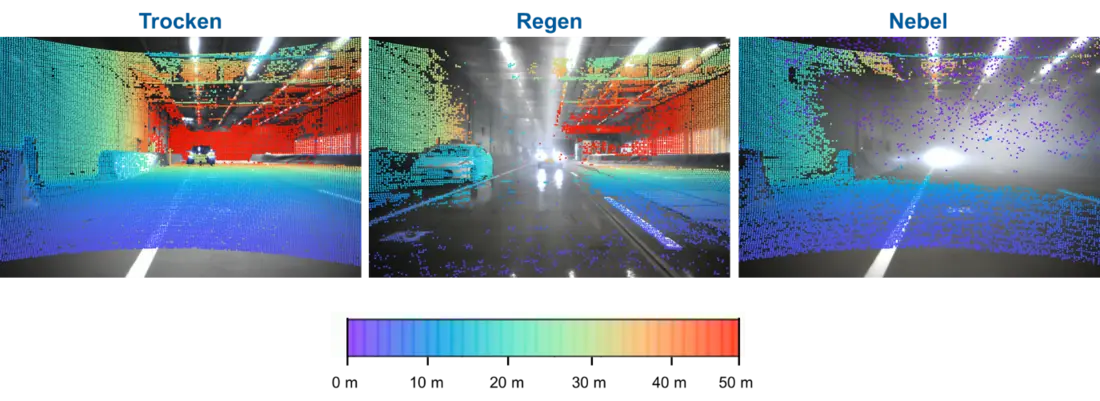
In C-ISAFE, environmental influences such as rain, fog and sun levels are simulated in the indoor test facility with specially developed test systems for weather as well as light. This allows weather effects and influences on the sensors to be researched and tested.





![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)