
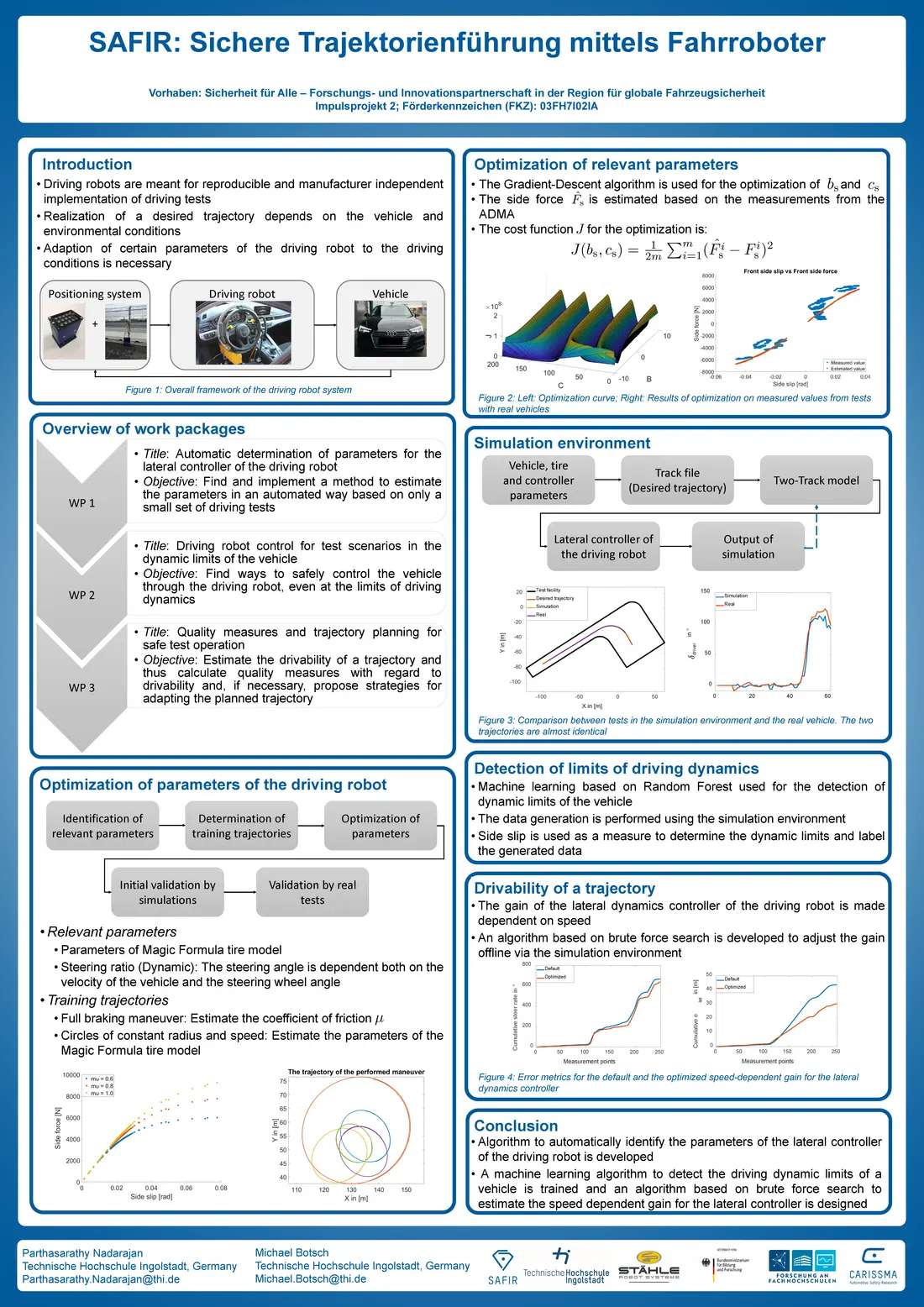
Driving robots are used for the reproducible and manufacturer-independent implementation of driving tests, in particular in the field of driver assistance systems. In order to realize a desired trajectory a set of parametes in a driving robot must be adapted to the vehicle and the environmental conditions. One goal of the research is to find and implement a method to estimate the necessary parameters in an automated way based on only a small set of driving tests.
The usage of driving robots to execute maneuvers at the driving limits of the vehicle is of critical importance when performing evasive maneuvers in safety critical situations. The research deals also deals with adapting the parameters of the dynamic controller based on the driving situation in order to drive at the dynamic boundaries of the vehicle. Additionally, the issue of adapting the driving robot trajectory in real-time is addressed, e. g., by adjusting the speed of the vehicle, in order to ensure the stability of the vehicle.

![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)