Audi AG
KI-Algorithmen für automatisiertes Fahren
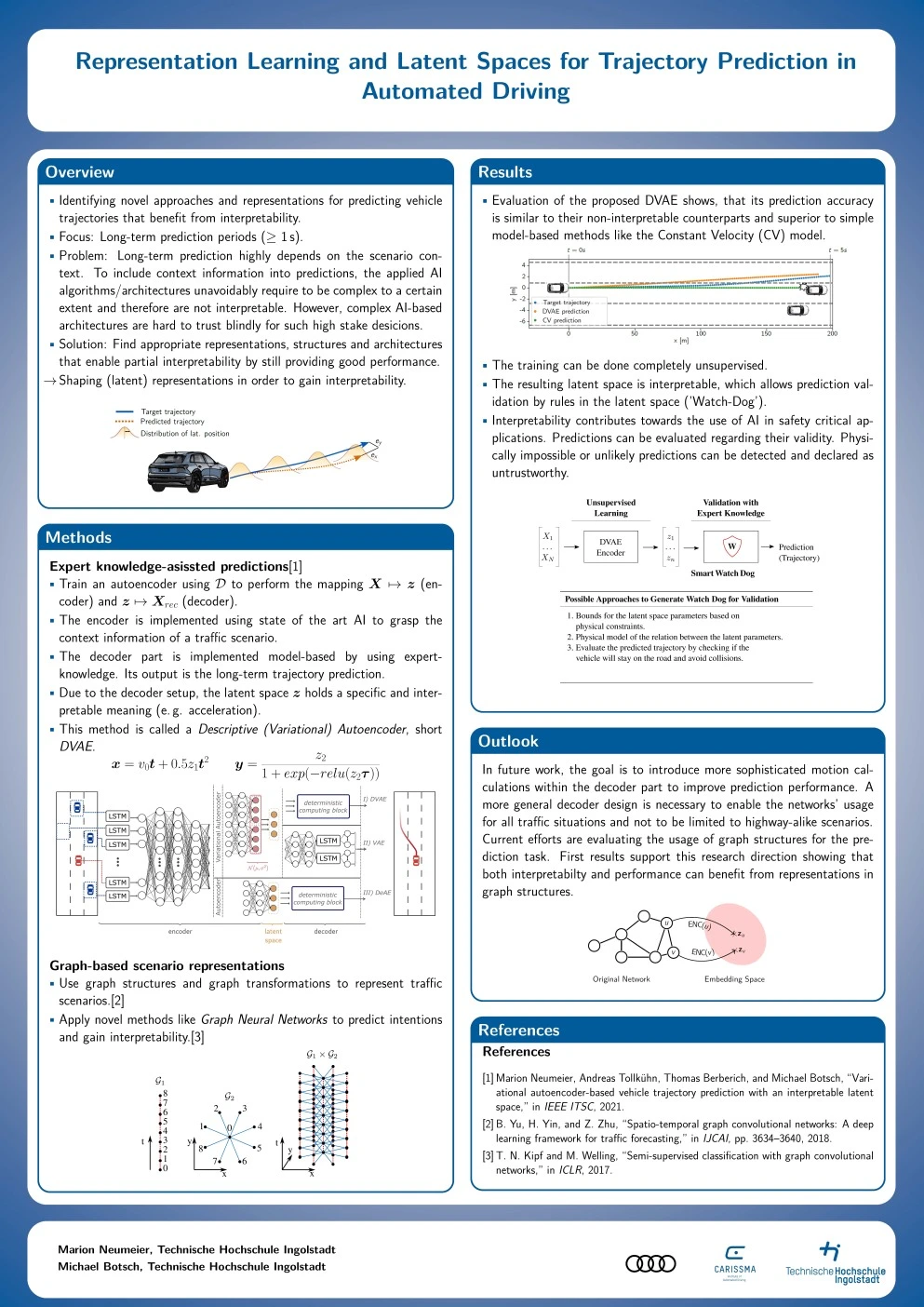
Im Zuge der Entwicklung von automatisierten Fahrfunktionen rücken KI-basierte Algorithmen zunehmend in den Fokus. Insbesondere in dem Gebiet der Trajektorienprädiktion von Fahrzeugen erreichen KI-Algorithmen eine Performanz, die mit model-basierten Ansätzen kaum erreicht werden kann. Die zentrale Aufgabe besteht bei der Trajektorienprädiktion darin, die Fahrabsicht eines ausgewählten Fahrzeuges anhand des räumlich-zeitlichen Kontexts eines Szenarios vorherzusagen. Der große Nachteil solcher KI-Algorithmen ist jedoch die fehlende Interpretierbarkeit: Obwohl ein Modell zuverlässige Vorhersagen trifft, ist unklar wie und basierend auf welcher Logik diese getroffen werden. Die Interpretierbarkeit von KI-Modellen, gerade im Umfeld sicherheitskritischer Anwendungen des automatisierten Fahrens, ist ein aktuelles Forschungsgebiet.
Das Ziel des Forschungsprojekts besteht darin, KI-Methoden zu entwickeln, um interpretierbare Repräsentationen von Verkehrsszenarien zu finden und diese zu nutzen, um komplexe Zusammenhänge für automatisierte Fahrfunktionen in kompakter Weise zu modellieren. Damit soll die Effizienz und Leistungsfähigkeit nachgelagerten Systemkomponenten verbessert werden. Der Schwerpunkt der Forschungsarbeiten liegt darin, sogenannte latente Räume von KI- Modellen derart zu gestalten, dass sie die gewünschte Interpretierbarkeit bieten. Damit kann die Plausibilität einer Prädiktion validiert werden, z. B. durch physikalische Modelle. Insbesondere im Kontext sicherheitskritischer Fahrzeugfunktionen spielen die betrachteten Ansätze eine zentrale Rolle.
![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)