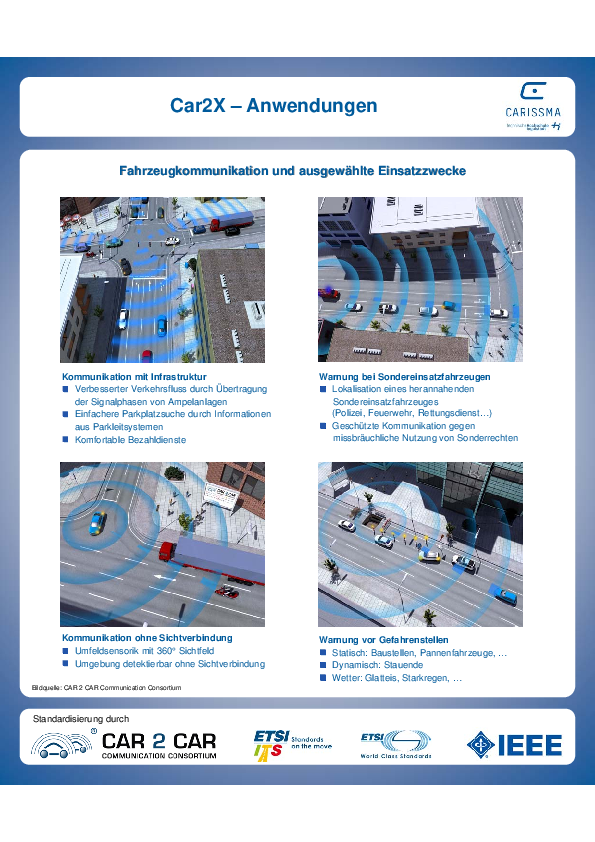
It is anticipated that Car2X communication will sustainablly improve the vehicle safety, transport efficiency and travel comfort. Based on WLAN-V2X and Cellular V2X, access technologies are available. In addition to applications for driver information and warning, the communication support for vehicle automation is being considered in research. This implies the massive exchange of sensor information for environmental perception and complex communication interaction among vehicles for maneuver negotions. Also, vulnerable road uses such as pedestrians and cyclists are increasingly involved into the information exchange.
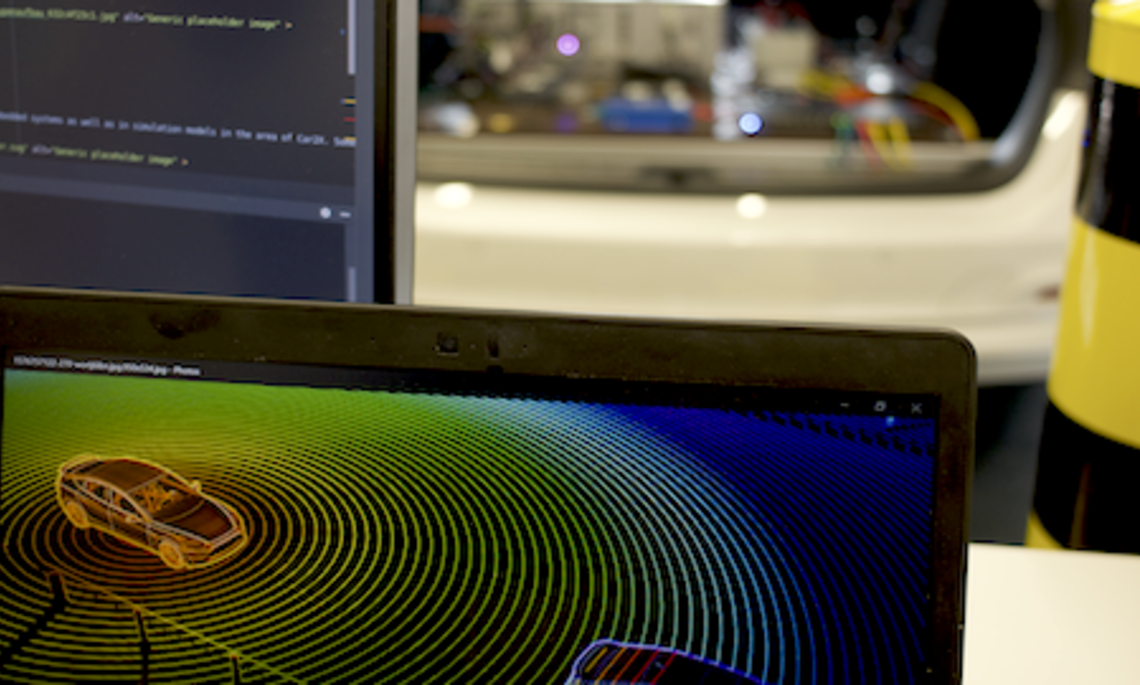
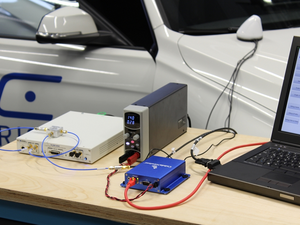
In order to evaluate and optimise Car2X communication systems, complementary test environments are available. Evaluation techniques include the use of simulations, HIL test benches, and real-life testing. Simulations allow a broad examination of use cases and protocols to be performed on powerful computing clusters. This enables, for instance, the safeguarding of Car2X applications by simulations. The performance of experimental Car2X prototypes can be tested in HIL environments. In real-life tests, Car2X platforms are integrated in the vehicle with the sensory system and can be tested under controlled conditions on a test site as well as in real road traffic.
Car2X and Cyber-Physical Systems



Ongoing Projects
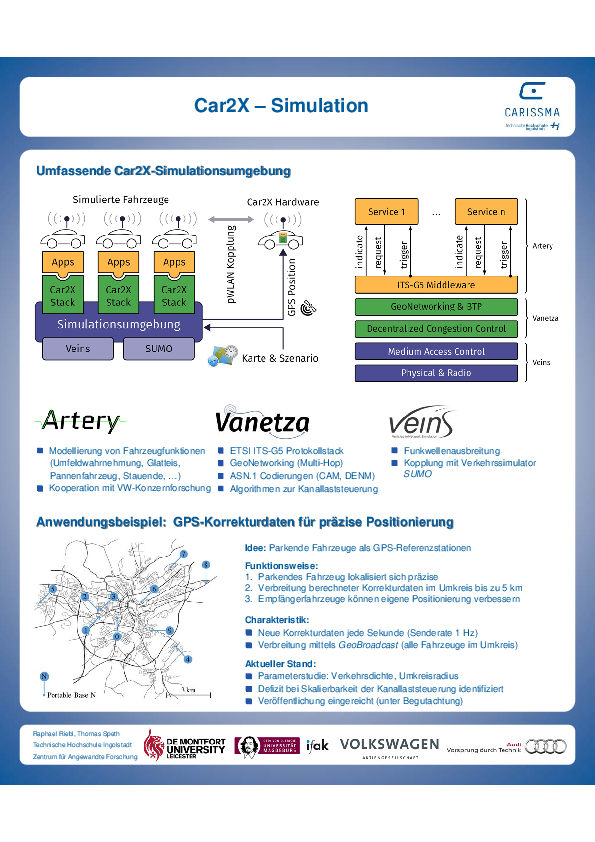
The aim of the sub-project is to develop an environment simulation for Car2X communication that makes it possible to test a Car2X control unit holistically. The focus is placed on the greatest possible variety of scenarios, which also allows complex scenarios for future Car2X applications to be simulated. This could be, for example, a highly cooperative driving manoeuvre with more than 50 vehicles. For meaningful test runs, it is important to ensure that the simulation always runs in real time.
Funding Organisation: Deutsche Forschungsgemeinschaft (DFG)
Funding code: 13FH7I03IA
The further development of wireless communication systems in recent years has made technologies available that can sustainably improve vehicle safety and traffic efficiency through their use. In particular, WLAN-V2X and Cellular-V2X shorten the communication latency compared to conventional systems through the direct exchange of information between vehicles. While the KOALA project in the first phase of SPP1835 mainly aimed at reducing the latency generated by the communication system and at latency modelling, the follow-up project KOALA2 addresses the use of this low-latency communication for vehicle automation in a holistic approach. KOALA2 has three main objectives. (i) The exchange of sensor data between vehicles for cooperative perception can exceed the currently available data rate of the communication link. In contrast to previous network congestion control methods, KOALA2 investigates adaptive methods in which the object lists to be transmitted are dynamically adjusted to the currently available data rate, taking into account the current driving situation. (ii) For scenario-based manoeuvre coordination between vehicles in cooperative use cases (such as lane changing, crowd driving/platooning and emergency steering), design patterns for communication will be developed to complement sensor-based manoeuvre planning with explicit communication. For this purpose, the current broadcast-based information dissemination will be extended to include communication in groups of vehicles exclusively comprising the actors of the respective manoeuvre. The design patterns will be used in a messaging framework to ensure reliable communication for planning, executing and completing/aborting cooperative driving manoeuvres. (iii) The developed procedures will be prototypically implemented and experimentally validated. The project sustainably improves cooperative perception and cooperative manoeuvre and trajectory planning as key technologies for safety-relevant use cases in cooperative automated driving.
Funding organisation: Deutsche Forschungsgemeinschaft (DFG)
Funding code: 273374642
Past Projects
In the SAVe research project, the applying THI professors Huber (test methods/effectiveness analysis), Botsch (autonomous driving/KI methods) and Facchi (Car2X systems) have laid the first stone for the creation of a prospective impact analysis for urban traffic space. The particularly accident-prone scenario left turn without right of way was modelled for manual traffic (reference) taking into account stochastic variations in the behaviour of all road users (incl. pedestrians, cyclists, e-scooters) and implemented in the specially developed Monte Carlo simulation environment "THIREKS". An automated vehicle was modelled and integrated as a treatment measure. However, the conservative environment detection purely with vehicle-internal sensor technology poses a risk to the driving function in inner-city traffic due to potential visual obscurations. Therefore, the simulation of the environment detection was extended by an overhead sensor model to estimate the performance gain of infrastructure measures (Car2X). In this sense, the overhead sensor also represents a measure whose effectiveness must be evaluated. Findings have already been presented and published at international conferences.
Open Source
Artery enables V2X simulations based on ETSI ITS-G5 protocols like GeoNetworking and BTP. Single vehicles can be equipped with multiple ITS-G5 services through Artery's middleware, which also provides common Facilities for these services.
Vanetza is an open-source implementation of the ETSI C-ITS protocol suite. This comprises the following protocols and features among others:
- GeoNetworking (GN)
- Basic Transport Protocol (BTP)
- Decentralized Congestion Control (DCC)
- Security
- Support for ASN.1 messages (Facilities) such as CAM and DENM
Though originally designed to operate on ITS-G5 channels in a Vehicular Ad Hoc Network (VANET) using IEEE 802.11p, Vanetza and its components can be combined with other communication technologies as well, e.g. GeoNetworking over IP multicast.
OpenROUTS3D (Open Realtime OSM- and Unity-based Traffic Simulator 3D) - A multi-purpose driving simulator developed for the needs of Teleoperated Driving.
- Map and Artificial Traffic Creation
- Input and Output management for Teloperated Driving
- Logging System and Replay Feature
- Simulation of Sensors
- Multiplayer
- User Study Mode
- Addon-System
InTAS is the realistic Ingolstadt traffic scenario for SUMO. This scenario comprises the following features:
- Modeled and Validated with real traffic numbers
- 24 hours of simulation
- Actual road network based on the city of Ingolstadt
- Street categories for VANETs simulation: tunnel, under.building, under.bridge
- Simulation of public parking areas
- Real location of all Traffic Lights in city
- Simulation of real Traffic Light Systems
- Buildings shape and location
- Simulation of public transport system: real bus routes with the actual time-table
You can watch InTAS presentation for the SUMO User Conference 2020.
Team

Prof. Dr. rer. nat. Christian Facchi
Phone: +49 841 9348-3650
Room: P207
E-Mail: Christian.Facchi@thi.de

Christina Obermaier, M.Sc.
Room: P102
Fax: +49 841 9348-996481
E-Mail: extern.Christina.Obermaier@thi.de

Silas Correia Lobo, M. Sc.
Phone: +49 841 9348-6519
Room: P102
E-Mail: SilasCorreia.Lobo@carissma.eu

![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)