
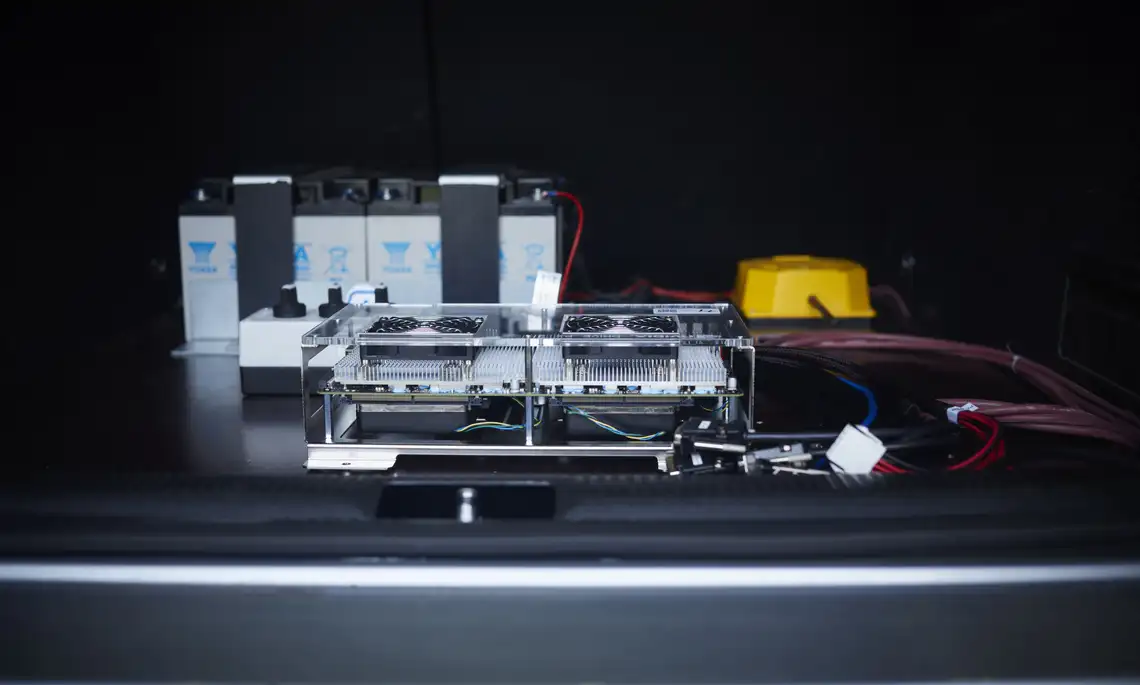
Hardware-in-the-loop (HIL) simulation represents an efficient method of testing and validating the functionality of system components in embedded electronic and mechatronic vehicle systems (for example, automotive control devices in an E/E network) at an early stage of their development. It consists of simulating the technical environment (e.g. the vehicle) to the necessary extent and feeding input data to the hardware to be tested. Typically, HIL testing involves bus/restbus, sensor, and vehicle/driving dynamics simulation. In the HIL laboratory at the CARISSMA research centre, new methods are being developed for testing complex safety systems based on environment sensors. The focus is on increasing the depth of testing and the coverage of the test space to allow efficient and consistent testing of automatic drive functions and integral safety concepts. This involves developing and analysing new test methods, for example, in the field of model-based testing, mixed reality and simulation-based sensor stimulation. In the latter case, simulated data is supplied through target simulators for actual environment and environmental sensors, as appropriate to the respective sensor.





![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)