The spectrum of potentially safety-critical situations for automated and connected vehicles (ACV) – particularly those involving vulnerable road users (VRUs) – is far too broad to test comprehensively (in conformity with ISO 26262) by naturalistic driving alone or within controlled, laboratory environments, which are subject to technical and ethical constraints. These and related challenges can be addressed by virtual, randomized controlled trial designs, utilizing detailed and validated stochastic (Monte-Carlo) simulation. Virtual trials can generate comprehensive databases and achieve the statistical power required to probe the high-dimensional traffic scenario space required for safety assessment and “stress testing” of ACF. Model validity is the crucial requirement for virtual testing; thus, the project SAVe (supported by BMVI, Germany) aims at generating a “digital twin” for the urban road network in Ingolstadt, Germany. Our research team is focusing on ACV-VRU interactions at urban intersections; this task requires validated (sub)-microscopic models for dynamics, cognition, and behavior (or occasional “misbehavior”) of road users, including all VRU categories. As an application, the potential for enhanced intersection safety performance and reliability of ACV by communication with external sensors (e.g., ”Bird’s eye view” observation) and data fusion will be tested in virtual trials.
Problem Statement
- How can new technologies be objectively assessed with regard to their (side) effects prior to their introduction into traffic?
- Traffic sample size to achieve statistical power for performance assessment of automated and connected vehicles (ACV) is far too large for naturalistic driving studies.
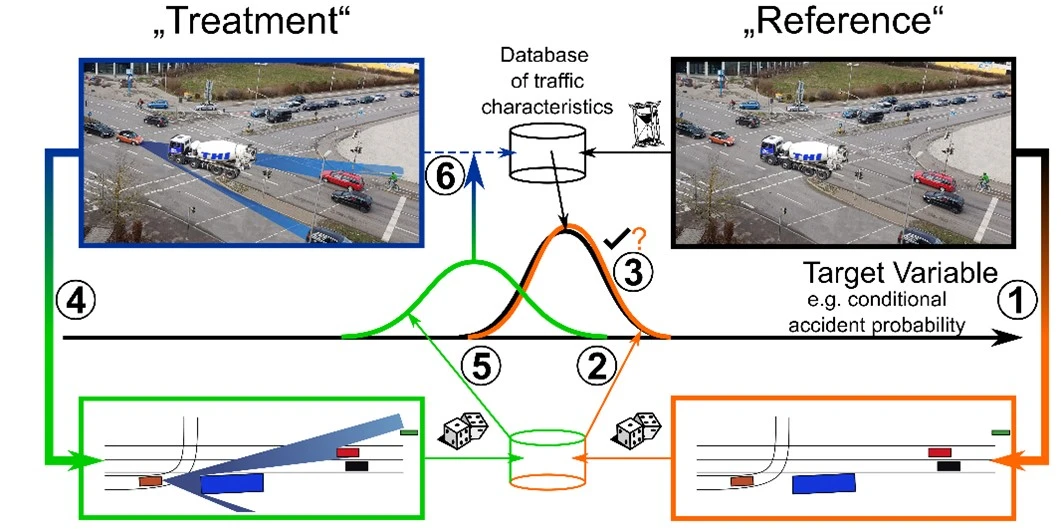
Approach: Virtual Experiments
- Modelling of current (stochastic) traffic processes as reference / baseline.
- Generation of synthetic traffic scenarios using stochastic simulation.
- Assessment-relevant distributions are tested on equivalence to real accident data.
- Integration of ACV simulation models with quantified model trustworthiness into the traffic process model.
- Generation of a sufficiently large sample of the changed traffic process by means of stochastic simulation with integrated ACV.
- Performance of the measure compared to the reference traffic process is evaluated.
Key Challenge: Cause-Effect Models of Manual Traffic Processes
- Traffic processes need to be modeled taking into account stochastic variations in the cognitive and dynamic behavior of all road users (including cyclists, e-scooters, etc.).
- Odd sample combinations of the underlying distributions can lead to accidents and therefore have to be modeled realistically to generate validated performance estimates.
- Model of variations in dynamic performance of E-Scooter drivers:
- Including parameters such as skill level, pertinent cognitive and perceptual features, dynamics and physical limitations
- Models of Human Cognitive Performance:
- Major causal factor in traffic accidents
- Reduce problem complexity by modelling only the most important failure processes that lead to traffic accidents
Benefits
- Development accompanying tool that can be used for early impact analysis of technologies on the overall traffic context.
- Reduction of misdevelopments due to misjudged (side) effects in the overall traffic context.
- Continuous cost efficient feedback on technology performance enables iterative optimization.
Current Projects
SAVeNoW researches a digital twin of urban traffic using the example of Ingolstadt, in which relevant static elements (e.g. roads, buildings, traffic infrastructure, traffic rules) and dynamic entities (e.g. road users) as well as framework conditions (time of day, weather) are mapped. With the help of this digital twin, questions regarding traffic efficiency, safety, ecology and social acceptance are analyzed and answered by solution scenarios with associated measures. The "overall tool" functions in two interlocking control loops consisting of a digital test field (real city) and its virtual representation as a city model, which simulates the above-mentioned domains in the form of "what-if" scenarios with corresponding measures and evaluates and optimizes the effectiveness of the measures. The basis is an IT-technically implemented overall architecture consisting of data acquisition, processing, modeling, simulation, evaluation, application and optimization. The overall model, which keeps the control loops in operation and develops them further, should be socially acceptable, operable and economical.
To develop road safety strategies and advance Vision Zero in the coming decades, a recognized and reliable method for the benefits of safety measures is needed. The V4Safety project will develop a predictive framework for this safety assessment. The aim is to be able to consider a wide range of safety measures in order to assess a priori and comparatively the contribution and impact of in-vehicle safety technologies as well as infrastructure solutions or new behavioral regulations.
The advised framework includes methods for projecting results to future traffic scenarios and across EU regions for use by policy makers, authorities and consumer organizations.
V4Safety also seeks to ensure comparability of safety study results by providing not only the framework but also guidelines for its application. The guidelines show how to select, configure and link relevant human, vehicle and environmental models and how to perform projection to different regions in the EU. Furthermore, it also allows projections for future scenarios that incorporate changes in the mobility system.
Completet Projects
In the SAVe research project, sub-projekt "Optimization of functions of automated driving" the applicant THI professors Huber (Test Methods/Effectiveness Analysis), Botsch (Autonomous Driving/AI Methods) and Facchi (Car2X Systems) have set the first stone in the creation of a prospective impact analysis for urban traffic space. The particularly accident-prone scenario of turning left without right of way was modelled for manual traffic (reference) taking into account stochastic variations in the behavior of all road users (including pedestrians, cyclists, e-scooters) and implemented in the specially developed Monte Carlo simulation environment "THIREKS". An automated vehicle was modelled and integrated as a treatment measure. However, the conservative environment detection purely with vehicle-internal sensor technology poses a risk for the driving function in inner-city traffic due to potential visibility obstructions. Therefore, the simulation of environment detection was extended by an overhead sensor model to estimate the performance gain of infrastructure measures (Car2X). In this sense, the overhead sensor is also a measure whose effectiveness must be evaluated. Findings have already been presented and published at international conferences.
Publications
- P. Brunner, F. Denk, R. Kates, W. Huber, K. Bogenberger, T. von dem Bussche "An E-Scooter Safety Experiment -Design, Methodolgy and Results", Transportation Research Board, Washington, USA, 2022
- P. Brunner, A. Löcken, F. Denk, R. Kates, W. Huber "Analysis of experimental data on dynamics and behavior of e-scooter riders and applications to the impact of automated driving functions on urban road safety", Intelligent Vehicles Conference, Las Vegas, USA, 2020
- F. Denk, W. Huber, P. Brunner, R. Kates "The role of perceptual failure and degrading processes in urban traffic accidents: a stochastic computational model for virtual experiments", International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 2020
- P. Brunner, F. Denk, W. Huber, R. Kates "Virtual safety performance assessment for automated driving in complex urban traffic scenarios", International Conference on Intelligent Transportation Systems (ITSC), Auckland, New Zealand, 2019
![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)