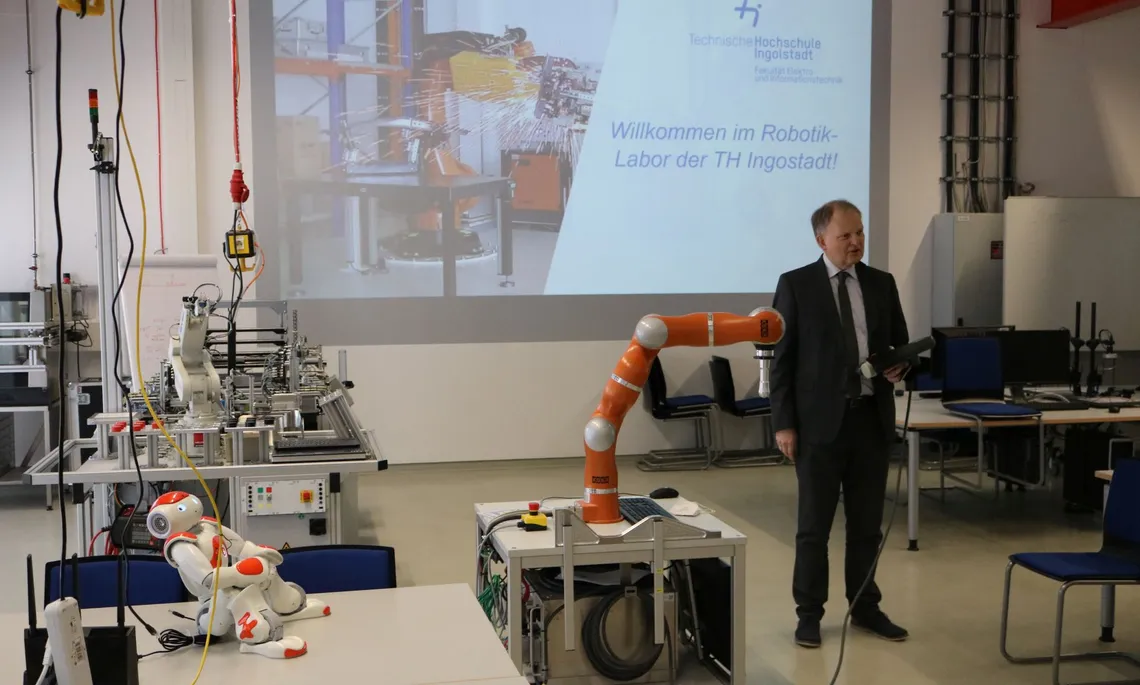
Das Robotiklabor ist eine zentrale Einrichtung für Übungen, Praktika, Projekte und Abschlussarbeiten der produktionsnahen Studiengänge an der TH Ingolstadt. Darüber hinaus kann es für experimentelle Untersuchungen im Rahmen von Forschungsprojekten genutzt werden. Die inhaltlichen Schwerpunkte des Labors liegen in der Robotik, der Automatisierungstechnik und der industriellen Bildverarbeitung. Weiterhin wird das Labor für Transferaktivitäten eingesetzt.
Robotiklabor (G003)

Ziele und Idee
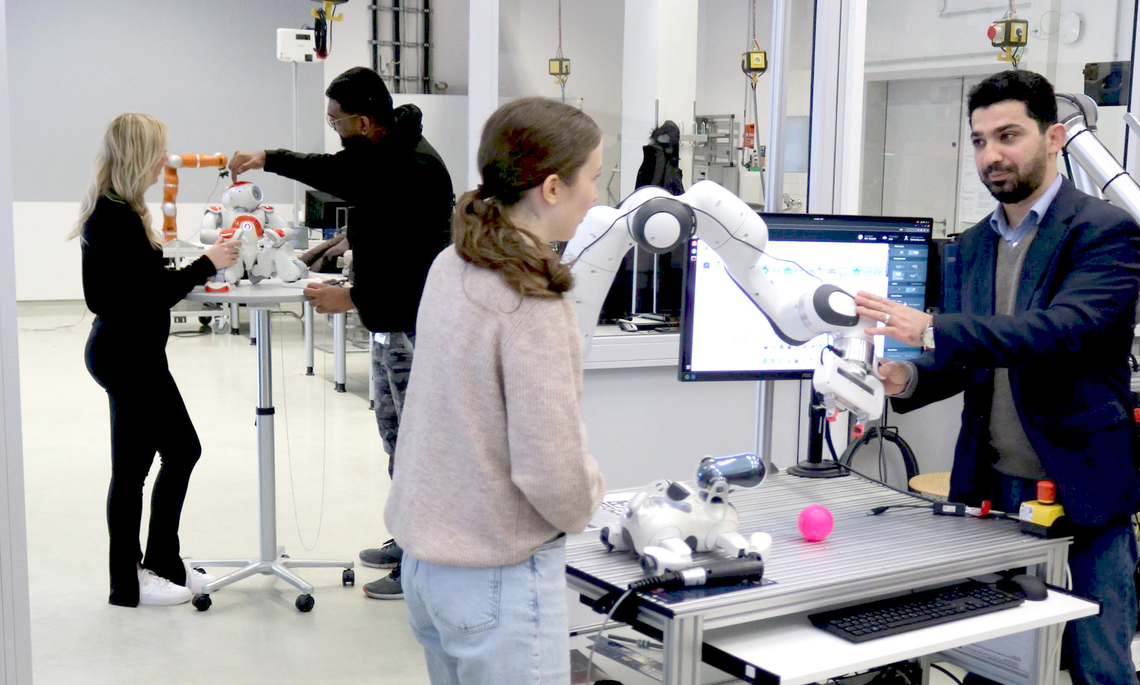
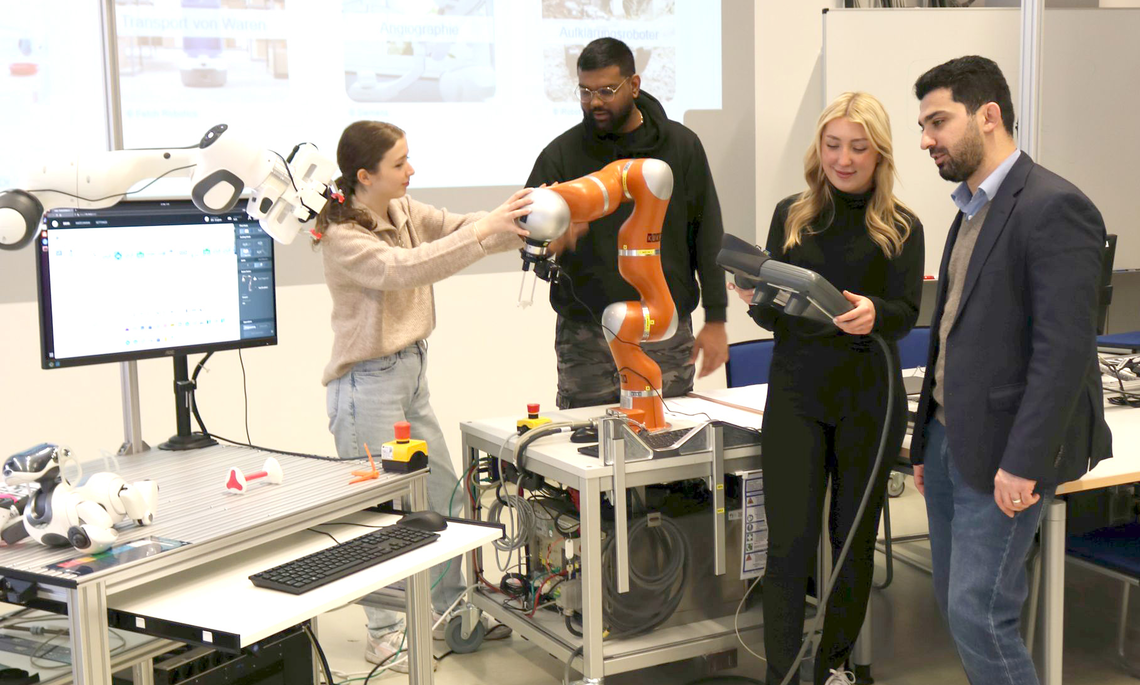
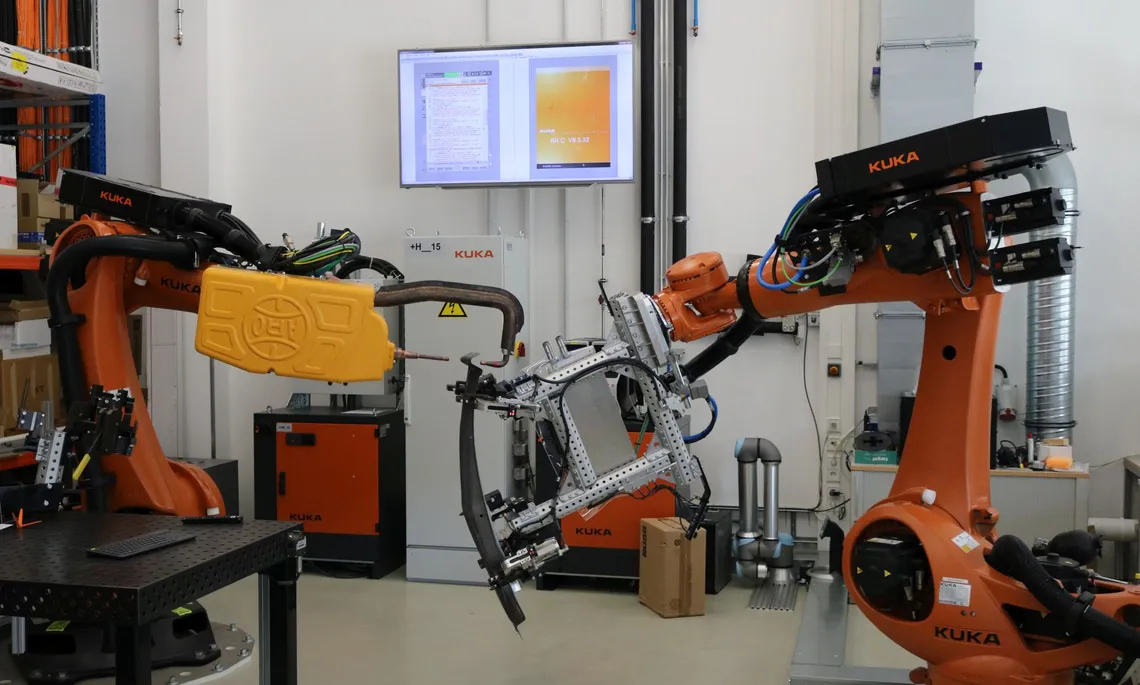
Das Robotiklabor hat eine Fläche von ca. 200 m². Es befindet sich hier eine Roboterzelle mit zwei KUKA kooperierenden Industrierobotern hoher Traglast: Diese sind für Schweiß- und Fügeanwendungen sowie Handhabungsaufgaben vorgesehen. Weiterhin ist das Labor mit verschiedenen MRK-fähigen Robotern (auch Cobots genannt) ausgestattet. Mithilfe der vorhandenen Sensorik, Roboterwerkzeugen und KI-Methoden können Roboterapplikationen sowie Kooperationen mit Menschen realisiert werden. Des Weiteren sind verschiedene mobile Roboterplattformen und Serviceroboter im Einsatz.
Labor G003






Laborausstattung und Aktivitäten
Geräte und Funktion
Das Robotiklabor verfügt über verschiedene Arten von Robotern:
- Franka Emika Research Roboter
- zwei klassische KUKA-Industrieroboter KR 240 (in Form des Doppelrobotersystems) ausgestattet mit einer Schweißanlage
- Universal Robot UR5
- ein positions- und kraftgeregelter Leichtbauroboter KUKA LBR4+
- Mitsubishi Industrieroboter
- mehrere mobile Roboterplattformen TurtleBot3
- ein humanoider Roboter NAO
- vier Hunde-Roboter Sony AIBO
- zwei moderne 3D-Kameras (OAK-D) mit integriertem Prozessor für KI-Anwendungen
- verschiedene Greifer
Mit diesen Robotern realisieren wir zum einen klassische Füge- und Montageaufgaben aus der industriellen Produktion, zum anderen aber auch neuartige Anwendungen, bei denen die Zusammenarbeit mehrerer Roboter als auch die Zusammenarbeit mit dem Menschen im Mittelpunkt stehen. Für die zuletzt genannten Anwendungen ist die Sensorik von großer Bedeutung; erst durch eine Vielzahl an Sensoren (Kameras, Kraftsensoren, taktile Sensoren) werden Roboter in die Lage versetzt, in wechselnden Situationen "intelligent" zu agieren und zu reagieren.
Neben den Robotern selbst sind auch die Greifer bzw. Roboterhände wichtig. Das Labor verfügt über eine Dreifinger-Greifhand der Fa. Schunk, deren Finger mit taktilen Sensoren ausgestattet sind und daher Gegenstände und deren Form erfühlen können.
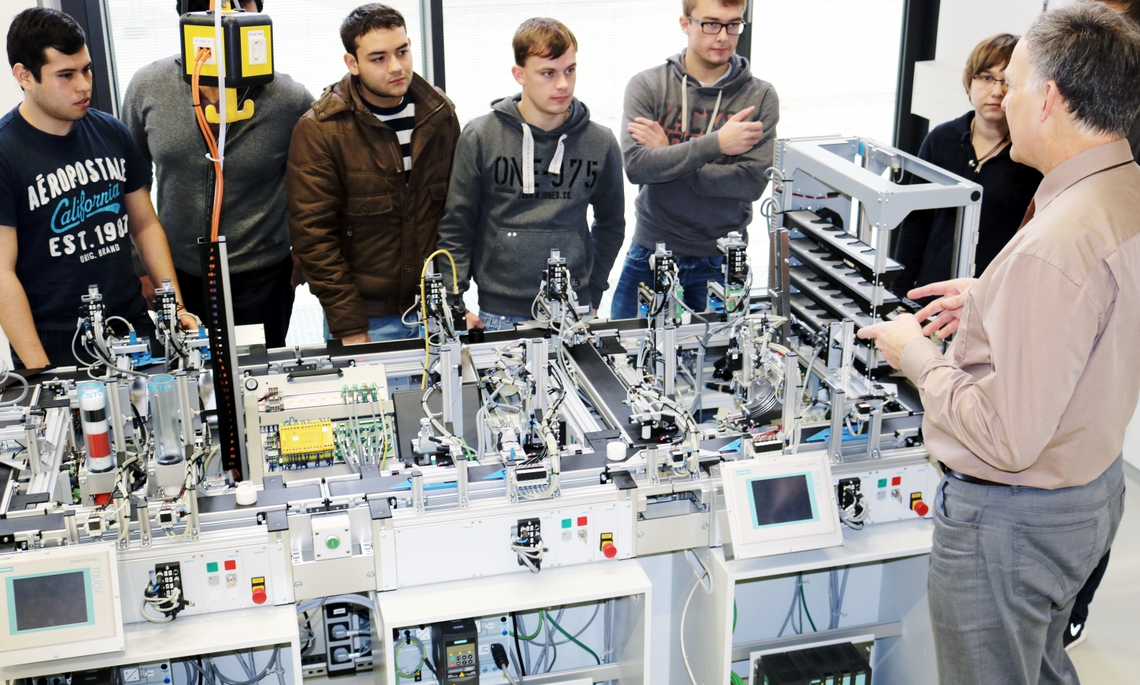
Mechatronische Lernfabrik:
Für die Lehre und Forschung in der Steuerungs- und Automatisierungstechnik ist das Labor mit einer mechatronischen Lernfabrik der Fa. Festo didactic ausgestattet. Diese Lernfabrik simuliert Produktionsaufgaben, indem Werkstücke mit RFID-Tags auf Transportbändern zu Bearbeitungsstationen geführt werden, an denen eine echte oder simulierte Wertschöpfung stattfindet (z.B. Messen, Montieren, Bohren, Wenden, Lagern, Aussondern usw.); ein sechsachsiger Roboter ist Teil der Lernfabrik. Die Lernfabrik verfügt über 5 SPS-7, welche die Stationen per ProfiBus und ProfiNet steuern. Die Topologie der Lernfabrik kann jederzeit geändert werden, so dass verschiedene Konfigurationen einer Produktionslinie simuliert werden können. Alle Steuerungsaufgaben einschließlich der Roboterprogramme können mit Hilfe der Software CIROS simuliert und visualisiert werden, so dass eine schrittweise "virtuelle Inbetriebnahme" einer neuen Fertigungsaufgabe möglich ist.
Laborleitung und Team

Studiengangleiter u. -fachberater "Robotik" (Bachelor)
Prof. Dr.-Ing. Ali Kanso
Tel.: +49 841 9348-3818
Raum: A105
E-Mail: Ali.Kanso@thi.de
Prof. Dr.-Ing. Ali Kanso
Tel.: +49 841 9348-3818
Raum: A105
E-Mail: Ali.Kanso@thi.de