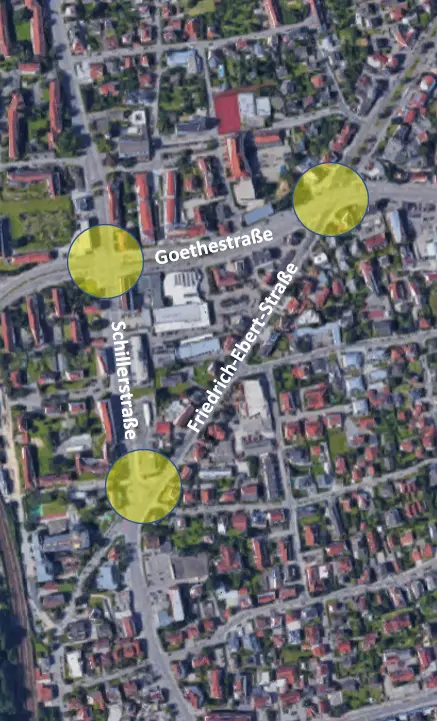
Im Rahmen des Projektes KIVI (Künstliche Intelligenz im Verkehrssystem Ingolstadt) werden datengetriebene Verfahren der Künstlichen Intelligenz entwickelt, um die Verkehrssteuerung und Verkehrssicherheit in Ingolstadt zu verbessern. In KIVI erfolgt der Aufbau eines High Definition Testfeldes (HDT), welches drei hochbelastete Knotenpunkte umfasst. An diesen Kreuzungen wird lokale Sensorik zur Echtzeit-Erfassung aller Verkehrsteilnehmer eingesetzt. Als Sensoren werden Laserscanner mit Egde Computing Devices incl. Auswertesoftware der Firma LiangDao sowie Thermalkameras neuester Generation verwendet, wodurch von vornherein die Anforderungen des Datenschutzes erfüllt werden. Das Institut für Automatisiertes Fahren (C-IAD) der THI baut dieses Testfeld mit Unterstützung der Projektpartner AININ, Fraunhofer und der Stadt Ingolstadt auf. Planung und bautechnische Umsetzung begleitet das Ingenieurbüro VCM aus München.
Als eine erste Anwendung zur Erhöhung der Sicherheit von vulnerablen Verkehrsteilnehmern wird ein Warnsystem realisiert, welches kritische Situationen in der Kreuzung frühzeitig entschärfen soll. Basis hierzu bilden leistungsfähige Kommunikationsnetze und Rechner vor Ort, auf welchen in Echtzeit Algorithmen zur Situationserkennung betrieben werden. Das HDT soll in Zukunft die Grundlage für die Erforschung von Methoden eines sicheren und fehlertoleranten Verkehrssystems unter Einbeziehung autonomer Fahrzeuge bieten. Die Sensortechnologie wurde vor dem Aufbau in den Kreuzungen im Detail auf dem Carissma Outdoorgelände der THI erprobt.