Nebelanlage
Mithilfe der Nebelanlage in der Indoor-Versuchsanlage können realistische Nebelszenarien simuliert werden. Eine Reduktion der Sichtweite (Meteorological Optical Range) auf bis zu 10 Metern ermöglicht auch die reproduzierbare Nachbildung extremer Nebelevents.
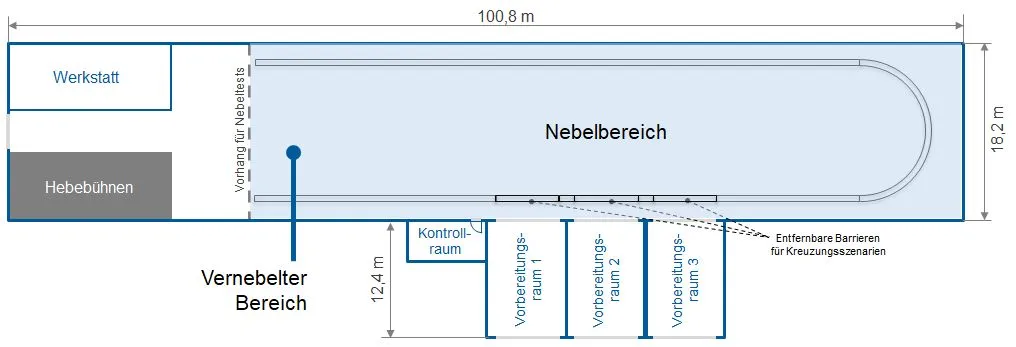
Auf einer vernebelten Fläche von ca. 780 m² (65 x 12 m) können neben statischen Tests auch dynamische Sensor- und Fahrversuche durchgeführt werden. Die Länge der Nebelfläche von 65 Metern ermöglicht die Erforschung der Auswirkungen auf die Fahrzeugumfeldsensorik auch über größere Distanzen. Da sich der stehende Nebel auch unter der Regenanlage bildet, sind auch Kombinationen aus Regen und Nebel möglich.
Das Testsystem lässt sich mit anderem Testequipment kombinieren, beispielsweise mit dem Indoor-Positionierungssystem zur akkuraten Positionierung und Ground Truth von statisch und dynamisch bewegten Objekten. Auch stehen diverse Targets (EuroNCAP konform) zur Verfügung.


Anwendungsbeispiele
Verringerung der Sichtweite (MOR) für Tests mit optischen Sensoren
Reduzierung des Kontraste von Kamerasensoren
Reproduktion von Streu- und Absorptionseffekte auf aktive Sensoren, wie Lidar und Radar
Blick ins Labor: 360° THI Campus Tour | Virtual experience by BESTVIEWS.de
Nutzungsmöglichkeiten
Kurzzeitmiete: Sie wollen Ihre Systeme unter Nebelbedingungen testen? Kontaktieren Sie uns gerne für weitere Informationen und ein auf Ihre Anforderungen zugeschnittenes Angebot.
Forschungsauftrag: Sie möchten die Anlage im Rahmen eines spezifischen Forschungs- oder Entwicklungsvorhabens nutzen und benötigen zusätzliche Fachexpertise? Wir unterstützen Sie gerne auch längerfristig bei der Durchführung und Auswertung Ihrer Versuche. Kontaktieren Sie uns gerne für weitere Informationen und ein auf Ihre Anforderungen zugeschnittenes Angebot.
Förderprojekt: Sie planen ein öffentlich gefördertes Projekt oder einen Antrag in den Bereichen Fahrzeugsicherheit, automatisiertes oder autonomes Fahren, innovative Mobilität oder verwandten Bereichen? Sprechen Sie uns an – wir stehen als kompetenter Partner für Forschung und Vorentwicklung zur Verfügung.
à Kontaktdaten siehe Infokasten rechts
Referenzen
Ausgewählte wissenschaftliche Publikationen
- D. Weihmayr, F. Sezgin, L. Tolksdorf, C. Birkner, and R. N. Jazar, "Predicting the Influence of Adverse Weather on Pedestrian Detection with Automotive Radar and Lidar Sensors," in 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju Island, South Korea, 2024, pp. 2591–2597, doi: 10.1109/IV55156.2024.10588472
- F. Sezgin, D. Vriesman, D. Steinhauser, R. Lugner, and T. Brandmeier, "Safe Autonomous Driving in Adverse Weather: Sensor Evaluation and Performance Monitoring," 2023 IEEE Intelligent Vehicles Symposium (IV), Anchorage, AK, USA, 2023, pp. 1-6, doi: 10.1109/IV55152.2023.10186596.
- M. Graf, D. Vriesman und T. Brandmeier, “Testmethodik zur Untersuchung, Validierung und Absicherung von Störeinflüssen auf Umfeldsensoren durch Witterung unter reproduzierbaren Bedingungen”, 14. VDI-Tagung Fahrzeugsicherheit, Fahrzeugsicherheit im Kontext neuer, nachhaltiger Mobilitätskonzepte, S. 231-248, 2023, doi: 10.51202/9783181024263.
- D. Steinhauser, P. Held, B. Thöresz, and T. Brandmeier, "Towards Safe Autonomous Driving: Challenges of Pedestrian Detection in Rain with Automotive Radar," in 2020 17th European Radar Conference (EuRAD), Utrecht, Netherlands, 2021, pp. 409-412, doi: 10.1109/EuRAD48048.2021.00110.
- D. Vriesman, B. Thoresz, D. Steinhauser, A. Zimmer, A. Britto, and T. Brandmeier, "An Experimental Analysis of Rain Interference on Detection and Ranging Sensors," in 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 2020, pp. 1-5, doi: 10.1109/ITSC45102.2020.9294505
- D. Schöppe, D. Steinhauser, B. Thöresz, S. Hasirlioglu, and T. Brandmeier, "Behavior of sensor systems for safety in automated driving with different weather conditions under reproducible conditions,” in 12. VDI-Tagung Fahrzeugsicherheit im Umfeld von neuen Rating- und Gesetzesanforderungen, 2019, pp. 205 – 218, doi: 10.51202/9783181023648-205.
- S. Hasirlioglu, I. Doric, A. Kamann, and A. Riener, "Reproducible fog simulation for testing automotive surround sensors," in 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, NSW, Australia, 2017, pp. 1–7, doi: 10.1109/VTCSpring.2017.8108566
Laborleitung und Team

Prof. Dr.-Ing. Thomas Brandmeier
Tel.: +49 841 9348-3840
Raum: H023
E-Mail: Thomas.Brandmeier@thi.de

Michael Graf, M.Sc.
Tel.: +49 841 9348-3418
Raum: H120
E-Mail: Michael.Graf@carissma.eu




