Detection of critical traffic situations and prediction of the crash constellation
Not all accidents can be avoided using Active Safety systems. Therefore, detecting the inevitability of accidents in critical traffic situations is a key element for Integrated Vehicle Safety. It combines the perception through exteroceptive sensors with the protection strategies of the restraint systems in the vehicle. Numerous sensors provide important information about the vehicle's situation and how traffic is moving. The vehicles and objects with which a collision may occur are most relevant for safety. For this purpose, hypotheses of their movement are set up, which are based on physical movement models and parameterized with the object information (e.g., position and speed) from the environment model of the sensors. In this way, accidents can be recognized as inevitable a few tenths of a second before the actual contact, and new, better restraint systems can be activated. The prediction of the crash constellation, i.e., where and how the vehicle collides with the collision object, enables a situation-specific estimate of the expected crash severity.
At C-ISAFE, we specifically address, among other things, the question of how the inevitability of a collision can be detected reliably and as early as possible. The possible movement trajectories are examined and supplemented with existing information to predict the actual movement to the best possible extent. Since a false triggering of safety systems, such as an airbag, must be avoided at all costs, there are strong requirements for a valid and robust decision on inevitability. In this context, the available information from the sensor system poses additional challenges due to measurement inaccuracies and the short time available before the collision. Therefore, we work closely with sensor system experts here.
Contact: Prof. Dr.-Ing. Thomas Brandmeier, Robert Lugner, Maximilian Inderst

Crash severity estimation
To take safety to the next level using autonomous driving, it is essential to activate passive restraint devices a few milliseconds before the accident occurs. Hereby, the decisive factor is the expected severity of the crash. It can be either the load on the human body or kinematic parameters such as the maximum acceleration during the accident. In this, the predictive crash severity estimation fulfills two fundamental functions.
On the one hand, it decides whether airbags are needed in the impending crash event. On the other hand, a pre-crash triggering of irreversible restraint devices is associated with a high risk, as the vehicle becomes uncontrollable. Hence, a false triggering can lead to serious injuries of the occupants and must therefore be avoided at any cost.
To this purpose, C-ISAFE investigates methodologies, which enable a reliable and robust crash severity estimation based on environmental sensor data but also achieves the conditions for pre-crash applications. This algorithm is validated using FEM as well as real crash test data.
Contact: Prof. Dr.-Ing. Thomas Brandmeier, Kilian Schneider, Gerald Sequeira

Contact-based validation sensor
One of the most important steps to activate any actuator system for vehicle safety systems based on predictive sensor technology is robust validation. A medium-term goal is a contact-based validation at contact time T0. This intermediate step would also ensure a smooth transition to activation of safety actuators before T0.
A contact-based validation gives the system stability against disturbing influences by, for example, weather or ghost objects. In addition, incorrect activation due to other sensor problems can be avoided. Light and soft objects with a large radar cross section can deceive a purely radar-based system, for example, but are intercepted by the subsequent validation. This prevents damage to the occupants and other road users due to incorrect activation of airbags and the like. Further information from the validation sensor can increase safety. Shortly after T0, the validation sensor measures the position and overlap of the impact. These values are then compared with the predictions from the predictive sensor systems.
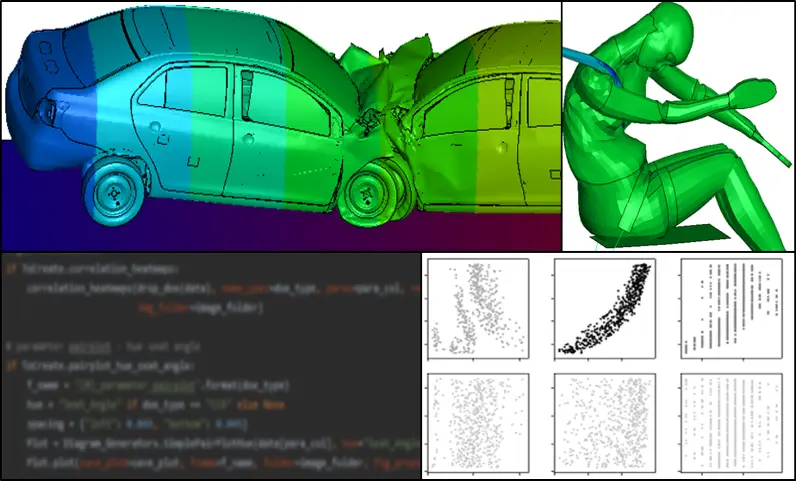
Virtual methods for occupant safety
The design methods for passenger safety in automobiles are changing. On the one hand, this development is caused by new requirements defined by consumer protection organisations and legislators, introducing new scenarios and evaluation approaches. The possibilities in the field of virtual development have also increased considerably. Thus, the focus is shifting from hardware testing to virtual methods.
The focal point of our research is on new methods for evaluating the design of systems for occupant protection as well as the vehicle crash mechanics in general. The main tool is the numerical simulation using the finite element method. Approaches of big-data-analysis and machine-learning are also considered. The investigations cover a wide spectrum of topics, like mathematical modeling of crash dynamics, conventional crash test dummies, their virtual images and human body models. Furthermore, the research work benefits from the proximity to the test facilities of the CARISSMA research and test centre.
Contact: Prof. Dr. Ondrej Vaculin, Franz Plaschkies

![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)


