Simulation based validation and evaluation of the performance of vehicle safety functions
The validation of autonomous driving functions in critical situations is crucial for their market launch as well as for public acceptance. In view of the limited time and cost, the majority of driving tests need to be performed in simulations and no longer with the real vehicle. The quality and validity of the results of the simulations must not differ significantly from that of the real test on the test track or on public roads for effective use in the validation of safety functions or even entire vehicles.
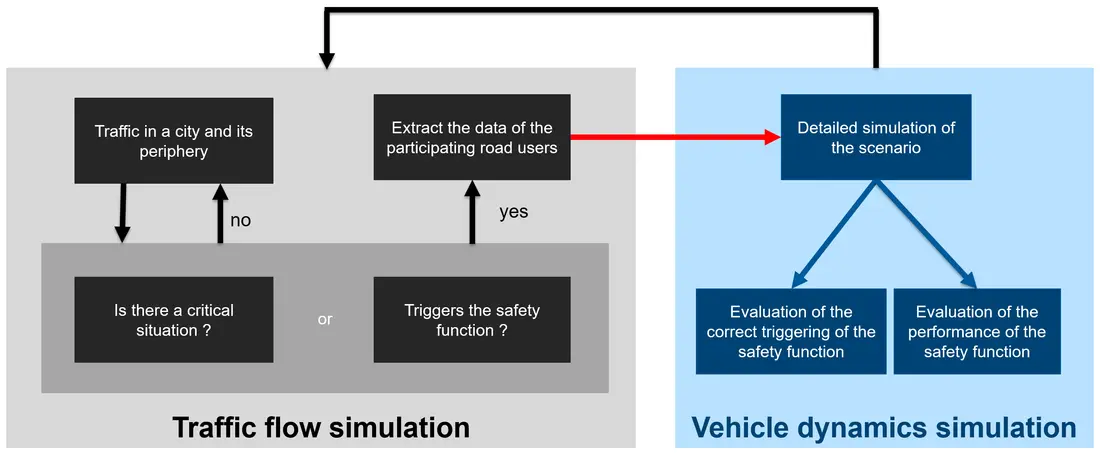
In this project the traffic in a city and its periphery is modelled by a traffic flow simulation. By driving errors, which are integrated into the behavior of the other road users, the ego vehicle gets into a variety of critical situations, which must be handled safely by the vehicle function to be tested. Traffic situations that can either be considered as critical or that have triggered the vehicle safety function are saved. Those situations are then analyzed more in detail in vehicle dynamics simulations.
Since nowadays, a complete virtual validation of a vehicle is technically and legally not possible yet, additional tests with the real vehicle are necessary, which are performed at the CARISSMA Outdoor facility. For this reason, characteristic manoeuvers, which serve as grid points for the situation space, must be selected from the total quantity of the scenarios performed in the simulation. On the one hand, these points should contain scenarios that allow uniform coverage of the test space. On the other hand, situations that bring the vehicle and the safety function to their limits must be taken into account.
Current Projects

Publications
- P. Riegl, A. Gaull and M. Beitelschmidt, "Criticality measures to evaluate the triggering decision of collision avoidance functions at intersections”, Journal of Traffic and Logistic Engineering, Volume 8, No. 2, December 2020
B. Simon, P. Riegl and A. Gaull, "Path Planning with Discrete Geometric Shape Patterns", 2019 IEEE International Conference of Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 2019
B. Simon, F. Franke, P. Riegl and A. Gaull, "Motion Planning for Collision Mitigation via FEM–Based Crash Severity Maps", IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019
P. Riegl, A. Gaull and M. Beitelschmidt, "A tool chain for generating critical traffic situations for testing vehicle safety functions", IEEE International Conference of Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 2019
- Peter Riegl, Andreas Gaull: “Modeling and validation of a complex vehicle dynamics model for real-time applications”, 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018)
- Bruno Simon, Peter Riegl, Andreas Gaull: “Motion planning with flexible trajectory chains”, IEEE International Conference on Vehicular Electronics and Safety (ICVES), 2018
![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)