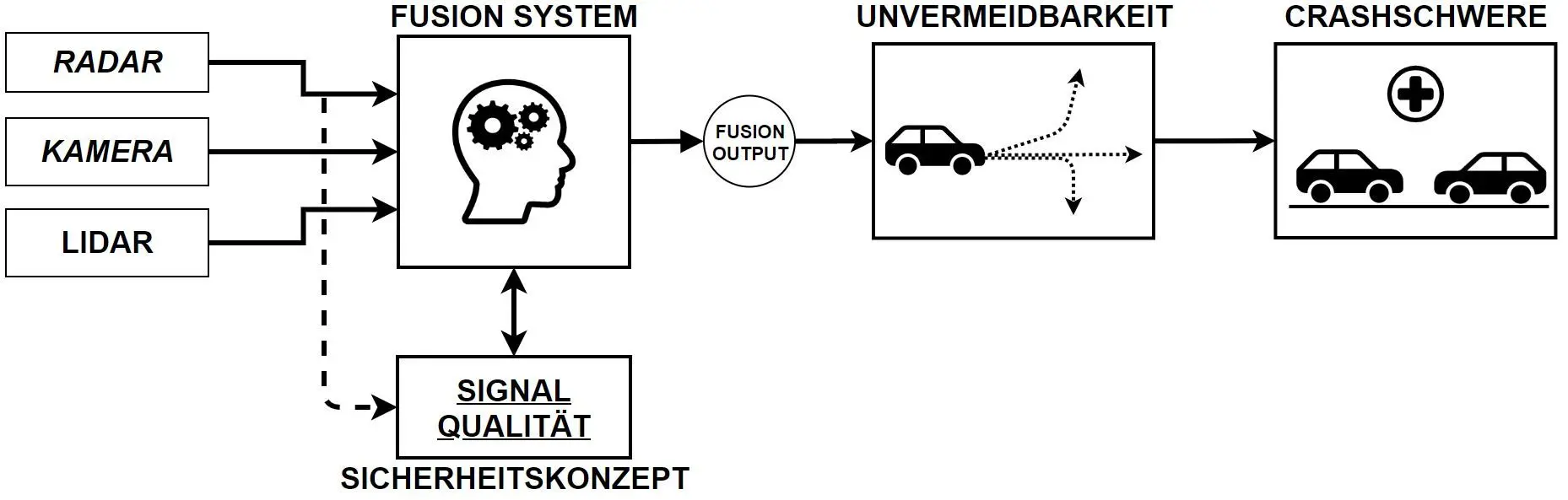
The increasing use of automated driving functions in urban areas requires robust monitoring of the vehicle environment through the use of various vehicle sensors. Not only the detection of suddenly appearing objects, such as a child chasing a ball but also the high dynamics of traffic and weather scenarios, such as rain and light reflections, can pose major challenges for detection algorithms. Therefore, the goal of SAVE-ROAD is to develop an environment recognition system for reliable prediction of potential accident severity. For this purpose, AI fusion methods such as neural networks based on raw sensor data from radar, camera, and LiDAR are investigated and compared. The robustness of these methods will be tested and evaluated under changing weather conditions such as rain and fog in C-ISAFE testl hall. This analysis will be used to develop a safety concept whose task is to control the quality of the delivered sensor signals. The AI fusion module delivers information about detected objects to an inevitability model, which predicts possible collision partners as well as associated parameters such as impact speed between vehicles. Finally, this data is used to estimate the severity of an accident using both physical modeling and AI evaluations of databases. As a project completion, a demonstrator will be built to implement verification of these algorithms under real-world conditions including rain and fog.
Projektpartner: PCO AG, EFS - Elektronische Fahrwerksysteme GmbH
Fördergeber: Bayerische Forschungsstiftung
Förderkennzeichen: AZ-1355-18
Contact

Prof. Dr.-Ing. Thomas Brandmeier
Phone: +49 841 9348-3840
Room: H023
E-Mail: Thomas.Brandmeier@thi.de

Daniel Vriesman, M.Eng.
Phone: +49 841 9348-3395
Room: H120
E-Mail: Daniel.Vriesman@carissma.eu

![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)