KOALA-2
Cooperatively interacting vehicles with low latency communication
Wireless communication systems have considerably evolved over the last years and advanced technologies for improving vehicle safety and traffic efficiency are available. In particular WLAN- V2X and Cellular V2X considerably shorten, in comparison to conventional communication systems, the communication latency by direct information exchange among vehicles.
Cooperative Perception
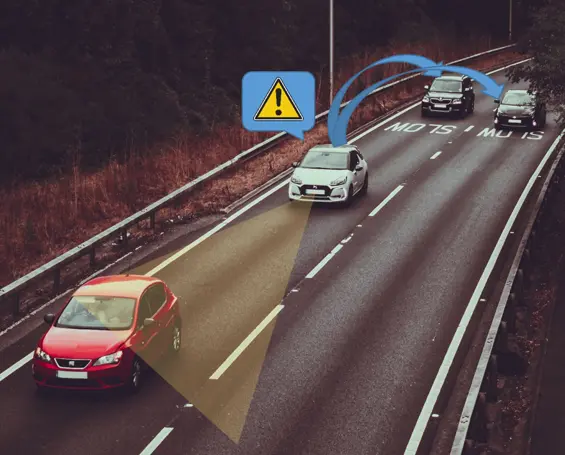
The exchange of sensor data among vehicles for cooperative perception can easily exceed the available data rate of the communication link. In contrast to previous approaches for data congestion control, KOALA2 studies adaptive schemes that dynamically adjust the generated object lists to match the instantaneous data rate, in consideration of the present driving situation.
Maneuver coordinination
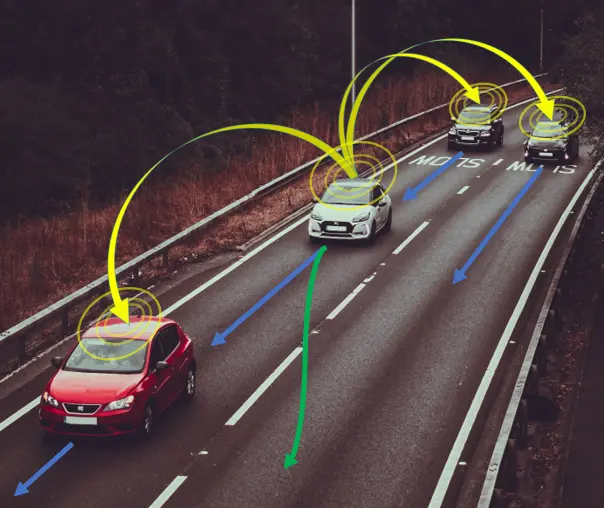
For scenario-based maneuver coordination among highly-automated vehicles in cooperative use cases (such as lane change, platooning and emergency steering) the project develops design patterns for communication, in order to complement sensor-based maneuver planning by explicit communication. The state-of- the-art broadcast-based information dissemination is extended by communication in groups of vehicles, which exclusively encompasses the actors of the corresponding maneuver. The design patterns are used in a messaging framework that realizes a reliable communication for planning, execution and completion (or termination) of cooperative driving maneuvers.
Team

Prof. Dr. rer. nat. Christian Facchi
Phone: +49 841 9348-3650
Room: P001
E-Mail: Christian.Facchi@thi.de

Prof. Dr.-Ing. Andreas Festag
Phone: +49 841 9348-2255
Room: B102
E-Mail: Andreas.Festag@thi.de


![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)