Erkennung kritischer Verkehrssituationen und Prädiktion der Crashkonstellation
Nicht alle Unfälle können durch aktive Sicherheitsfunktionen vermieden werden. Daher ist die Detektion der Unvermeidbarkeit von Unfällen in kritischen Verkehrssituationen ein Schlüsselelement für die Integrale Fahrzeugsicherheit. Dabei verbindet es die Wahrnehmung durch die Sensoren mit den Schutzstrategien der Rückhaltesysteme im Fahrzeug. Zahlreiche Sensoren liefern wichtige Informationen über die Fahr- und Verkehrssituation, in der sich ein Fahrzeug befindet. Für die Sicherheit sind dabei besonders die Fahrzeuge und Objekte relevant, mit denen es zu einer Kollision kommen kann. Dazu werden Bewegungshypothesen aufgestellt, die auf physikalischen Bewegungsmodellen basieren und mit den Objektinformationen (z. B. Position und Geschwindigkeit) aus dem Umfeldmodell der Sensoren parametriert werden. So können Unfälle bereits einige Zehntelsekunden vor der eigentlichen Berührung als unvermeidbar erkannt und neue, bessere Rückhaltesysteme aktiviert werden. Die Prädiktion der Unfallkonstellation, also wo und wie das Fahrzeug mit dem Kollisionsobjekt aufeinandertrifft, ermöglicht eine situationsgenaue Schätzung der zu erwartenden Crashschwere.
Im Institut C-ISAFE beschäftigen wir uns unter anderem gezielt mit der Frage, wie die Unvermeidbarkeit einer Kollision zuverlässig und möglichst früh erkannt werden kann. Dazu werden beispielsweise die möglichen Bewegungstrajektorien untersucht und mit vorhanden Informationen ergänzt, so dass die tatsächliche Bewegung bestmöglich vorhergesagt werden kann. Da eine Fehlauslösung von Sicherheitssystemen, wie beispielsweise eines Airbags, unbedingt zu vermeiden sind, bestehen hier starke Anforderungen an eine valide und robuste Entscheidung zur Unvermeidbarkeit. Dabei stellen die zur Verfügung stehenden Informationen aus der Sensorik aufgrund von Messungenauigkeiten und der geringen verfügbaren Zeit vor der Kollision zusätzliche Herausforderungen dar. Daher arbeiten wir hier eng mit Sensorsystemexperten zusammen.
Ansprechpartner: Prof. Dr.-Ing. Thomas Brandmeier, Robert Lugner, Maximilian Inderst

Crashschwereschätzung
Um die Sicherheit beim autonomen Fahren auf das nächste Level zu heben, ist eine Aktivierung von passiven Rückhaltemitteln wenige Millisekunden vor dem Unfall unabdingbar. Ausschlaggebend hierfür ist die zu erwartende Schwere des Unfalls. Sie kann entweder mit der Belastung auf den menschlichen Körper oder kinematischen Parametern wie der maximalen Beschleunigung während des Unfalls erfolgen. Hierbei erfüllt die vorausschauende Schätzung der Crashschwere zwei fundamentale Funktionen.
Auf der einen Seite entscheidet sie, ob in dem bevorstehenden Crashevent Airbags benötigt werden. Auf der anderen Seite ist eine Pre-Crash Auslösung von irreversiblen Rückhaltemitteln mit einem hohen Risiko behaftet, da das Fahrzeug unkontrollierbar werden kann. Infolgedessen kann eine Fehlauslösung zu schweren Verletzungen der Insassen führen und muss daher möglichst vermieden werden.
Daher forscht C-ISAFE an einer Methode, die eine zuverlässige und robuste Unfallschwereschätzung auf Basis der Umfeldsensordaten ermöglicht und gleichzeitig die Bedingungen für Pre-Crash Anwendungen erfüllt. Dieser Algorithmus wird anhand echter Crashtestdaten validiert.
Ansprechpartner: Prof. Dr.-Ing. Thomas Brandmeier, Kilian Schneider, Gerald Sequeira

Kontaktbasierter Validierungssensor
Einer der wichtigsten Schritte zur Aktivierung jeder Aktorik für Fahrzeugsicherheitssysteme basierend auf vorausschauender Sensorik ist eine robuste Validierung. Ein mittelfristiges Ziel ist eine kontaktbasierte Validierung zum Kontaktzeitpunkt T0. Dieser Zwischenschritt würde auch einen reibungslosen Übergang zu Aktivierung von Sicherheitsaktorik vor T0 gewährleisten.
Eine kontaktbasierte Validierung gibt dem System Stabilität gegenüber Störeinflüssen durch beispielsweise Witterung oder Geisterobjekte. Zusätzlich kann eine Falschaktivierung aufgrund anderer Sensorproblematiken vermieden werden. Leichte und weiche Objekte mit einem großen Radarquerschnitt können beispielsweise ein rein radar-basiertes System täuschen, werden aber durch die nachfolgende Validierung abgefangen. So können keine Schäden an den Insassen und anderen Verkehrsteilnehmern durch Fehlauslösungen von Airbags u. ä. entstehen. Weitere Informationen aus dem Validierungssensor können die Sicherheit weiter steigern. Kurz nach T0 misst der Validierungssensor die Position und Überlapp des Aufpralls. Diese Werte werden daraufhin mit den Prädiktionen aus den vorausschauenden Sensorsystemen verglichen.
Ansprechpartner: Prof. Dr.-Ing. Thomas Brandmeier, Gerald Sequeira
Virtuelle Methoden für Insassensicherheit
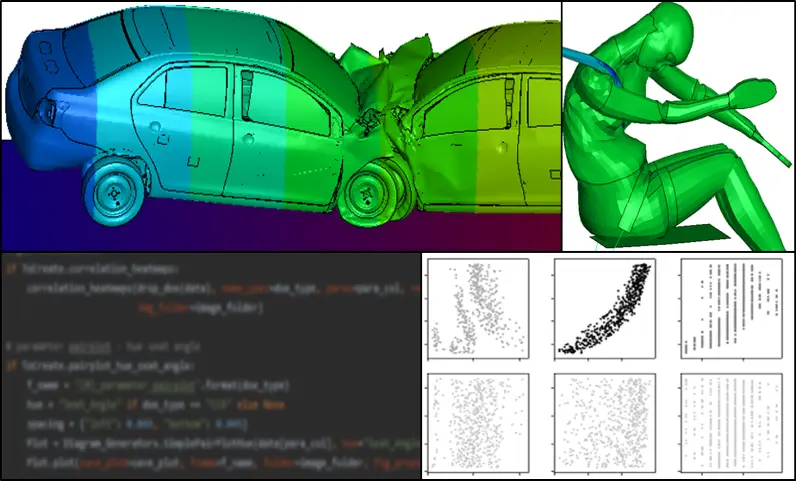
Die Auslegungsmethoden der Insassensicherheit in Automobilen befinden sich im Wandel. Bedingt wird die Entwicklung einerseits durch neue, von Verbraucherschutz-Organisationen und Gesetzgeber definierte Anforderungen. Diese beinhalten neue Szenarien und Auswertungsansätze. Auch haben die Möglichkeiten im Bereich der virtuellen Entwicklung stark zugenommen. Der Schwerpunkt bewegt sich von realem in Richtung virtuellem Testen.
Der Fokus unserer Forschung liegt auf neuen Methoden zur Bewertung der Auslegung von Systemen zum Insassenschutz sowie auf der Fahrzeug-Crash-Mechanik im Allgemeinen. Hauptwerkzeug ist dabei die Simulation mittels Finite-Elemente-Methode. Auch Ansätze der Big-Data-Analyse und des maschinellen Lernens werden betrachtet. Die Untersuchungen decken ein breites Spektrum ab. Dazu gehört die mathematische Modellierung von Crash-Dynamiken, herkömmliche Crashtest-Dummys, ihre virtuellen Abbilder und Menschmodellen. Darüber hinaus profitieren die Forschungsarbeiten von der Nähe zu Versuchsanlagen des Forschungs- und Testzentrums CARISSMA.
Ansprechpartner: Prof. Dr. Ondrej Vaculin, Franz Plaschkies