KOALA-2
Kooperativ interagierende Automobile mit geringer Kommunikationslatenz
Durch die Weiterentwicklung drahtloser Kommunikationssysteme in den letzten Jahren stehen Technologien zur Verfügung, die durch ihren Einsatz die Verkehrssicherheit und -effizienz nachhaltig verbessern können. Insbesondere WLAN-V2X und Cellular-V2X verkürzen, im Vergleich zu herkömmlichen Systemen, die Kommunikationslatenz durch den direkten Informationsaustausch zwischen Fahrzeugen.
Forschungsthemen
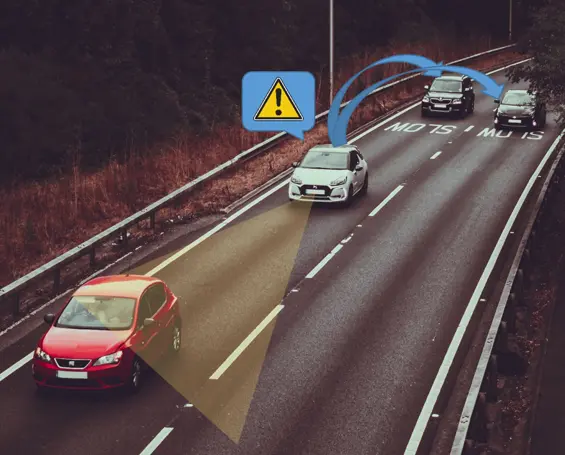
Kooperative Umfeldwahrnehmung
Der Austausch von Sensordaten zwischen Fahrzeugen für die kooperative Wahrnehmung kann die aktuell verfügbare Datenrate des Kommunikationslinks überschreiten. Im Gegensatz zu bisherigen Verfahren der Überlaststeuerung im Netzwerk untersucht KOALA2 adaptive Verfahren, bei denen die zu übertragenden Objektlisten, unter Einbeziehung der gegenwärtigen Fahrsituation, dynamisch an die aktuell verfügbare Datenrate angepasst werden.
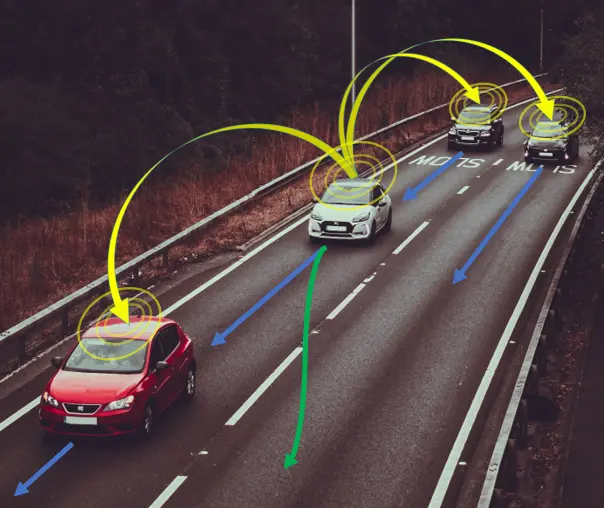
Manöverkoordinierung
Für die szenariobasierte Manöverkoordinierung zwischen hochautomatisierten Fahrzeugen in kooperativen Use Cases (wie Fahrstreifenwechsel, Pulkfahren/Platooning und Notlenkung) werden Entwurfsmuster für die Kommunikation entwickelt, um die sensorgestützte Manöverplanung durch explizite Kommunikation zu ergänzen. Die Entwurfsmuster werden in einem Messaging Framework verwendet, um eine zuverlässige Kommunikation zur Planung, Durchführung und Abschluss bzw. Abbruch von kooperativen Fahrmanövern zu gewährleisten.
Laufzeit
01.10.2019 - 30.09.2022
Team

Prof. Dr. rer. nat. Christian Facchi
Tel.: +49 841 9348-3650
Raum: P001
E-Mail: Christian.Facchi@thi.de

Prof. Dr.-Ing. Andreas Festag
Tel.: +49 841 9348-2255
Raum: B102
E-Mail: Andreas.Festag@thi.de

Daniel Maksimovski, M. Eng.
Tel.: +49 841 9348-3413
Raum: P103
E-Mail: Daniel.Maksimovski@carissma.eu