Unmanned Aerial Vehicles (UAVs) have seen increasing use in recent years [1].
One commonly used type of aircraft is the remote-controlled multi-copter, often referred to as a 'drone'. These vehicles can perform a variety of tasks that are dangerous or difficult to accomplish by other means.
For example, they can be used for crowd observation in conflict management by law enforcement, or for surveying forests and other areas that are difficult to access by land [2]. Therefore, it is crucial to have a robust system in place that can intercept and navigate around dangerous obstacles such as trees, other drones, or approaching objects [3].
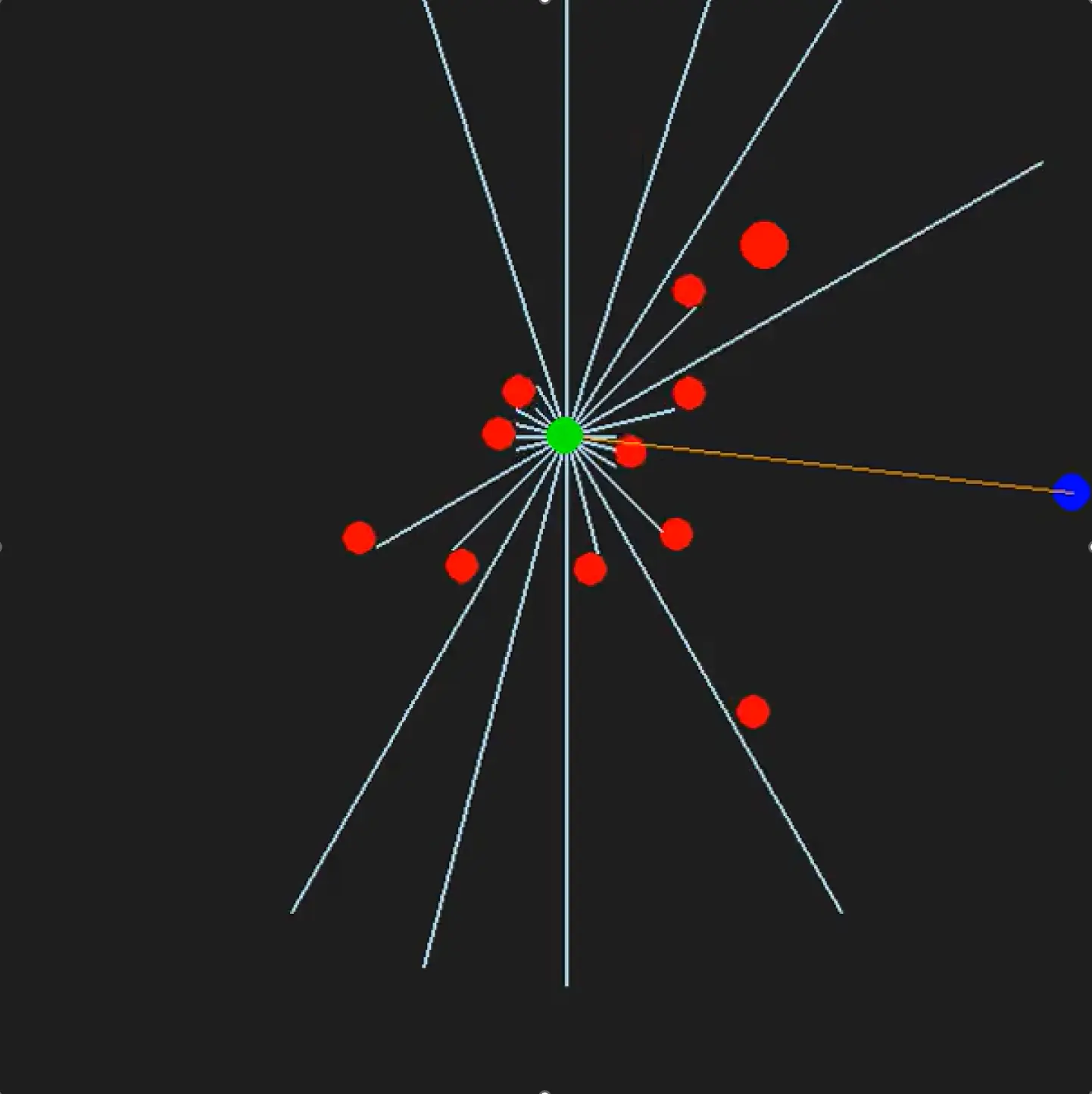
This project aims to solves this problem by utilizing Reinforcement Learning (RL) and a LiDAR Sensor. A RL Algorithm trained in simulation is capable to adapt to a multitude of unseen scenarios, while a LiDAR Sensor provides a dense scan of its surroundings, allowing for 360° surveillance.



![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)


