Focus:
- Mass and driving resistance estimation
- Component and parameter estimation in the electric drive train
- Robust parameter estimation
Summary:
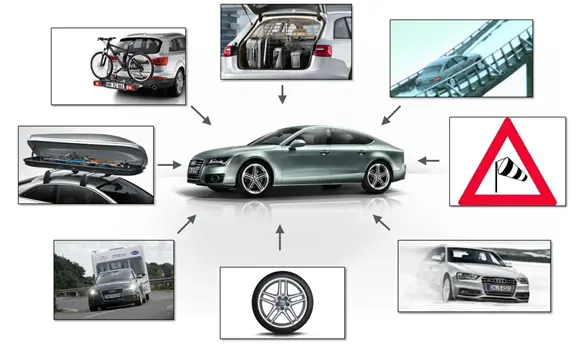
For future driver assistance systems, energy management or range calculation, exact models of vehicle longitudinal dynamics are required. The performance of these vehicle functions depends significantly on the accuracy of the model parameters. Important parameters for longitudinal dynamics are the vehicle mass and the driving resistance, consisting of rolling resistance and air resistance.
The required values are variable during operation and during the product lifetime, e.g. due to loading, add-on parts or variable tires. For economic and technical reasons, it is not possible to measure the parameters directly on the vehicle. However, modern automobiles have a large number of sensor signals, which, together with a vehicle model and sensor data fusion, provide the required parameters.
Within the framework of this project, a new estimation algorithm is being developed that determines the vehicle parameters as fast as possible with little computing and storage effort. In addition, the method should be robust against measurement errors and situations with poor excitation.
Contact

Prof. Dr.-Ing. Christian Endisch
Phone: +49 841 9348-3368
Room: S 426 (Stauffenbergstr. 2a in the DK building)
E-Mail: els@thi.de
![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)